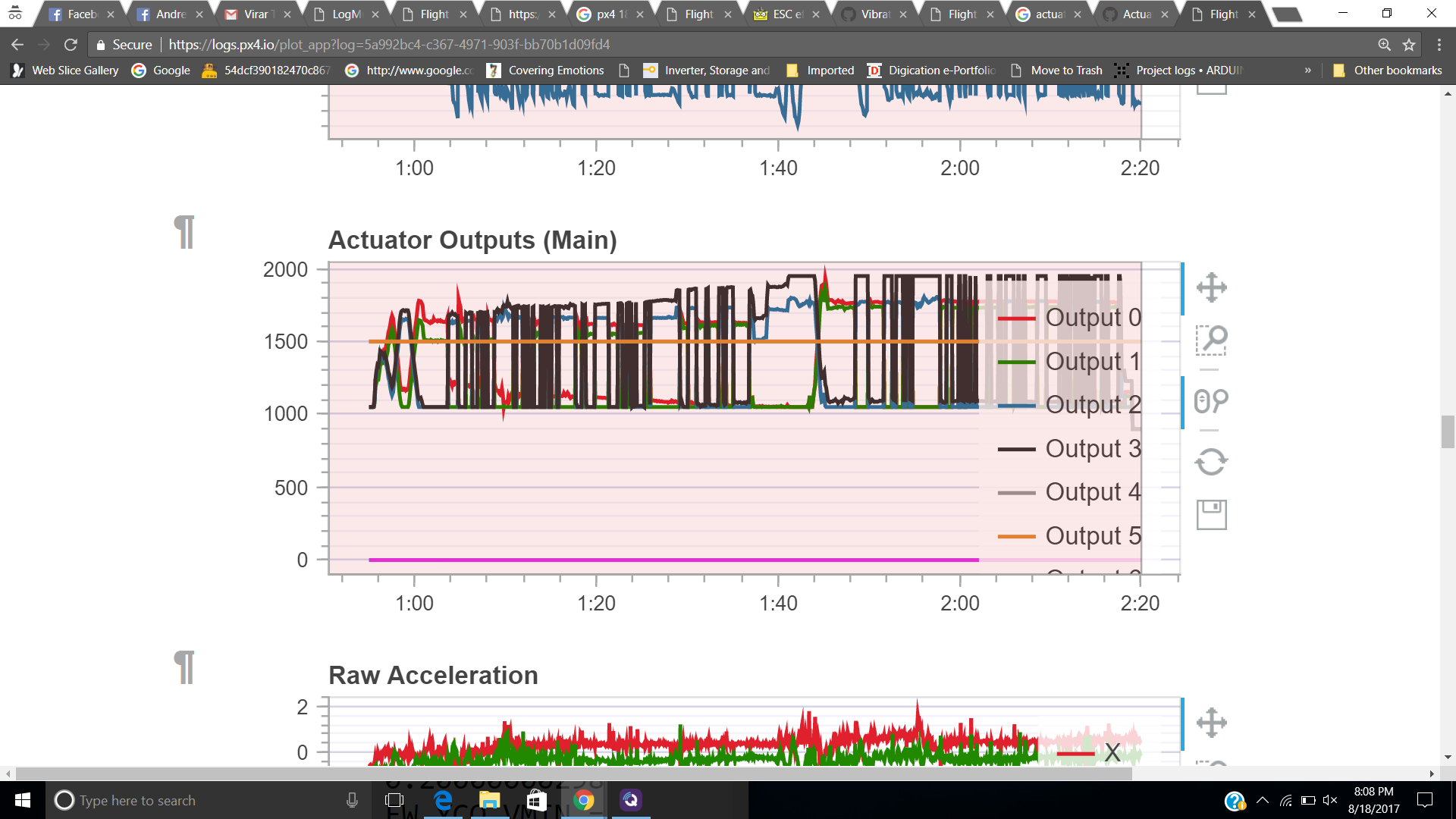
I tried finding out in manual mode where my vibrations are coming so i find out a heading where a sound is coming and which was producing a jerk into the frame. I have attached the actuator output graph in which the rapid switching take place at that particular point which might be the reason for the vibration but i don’t know why it happening.
For my vehicle, I found that when it hold the position and keep stable, the actuator output 0,1 were quite smaller than 2,3, and after flying I touched the motors, no.3 and no.4 were hotter than no.1 and no.2.
I have already calibrated the ESC and I don’t know why it coming.