Hey,
I’m currently trying to tune and reduce the noise of a multicopter.
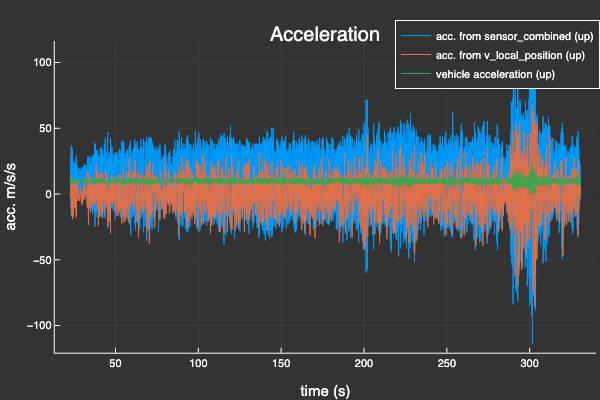
Since we observe a lot of noise on the vertical axis (vehicle_local_position.vz and vehicle_local_position.az), I tried to reduce the cutoff frequency of IMU_ACCEL_CUTOFF. Only to realize (after digging in the code) that IMU_ACCEL_CUTOFF applies a filter for vehicle_acceleration which seems to be used only by the land detector and the landing target estimator.
So, as far I understand this parameter does not affect the position controller at all. Is that correct?
Is there a reason behind it? @dagar Is there plans to include that in future releases?
I understand that filtering a signal creates a delay, which we might not want to feed into the EKF.
In my case, I wouldn’t mind a bit of delay to reduce the noise of the signals.
Best,