I read the paper “PX4: A node-based multithreaded open source robotics framework for deeply embedded platforms” these days, I found that the PX4 API allows to use the same code on ROS!!! And I didn’t know this before!!!
But I’m confused how to use the PX4 API on ROS. Is there any instructions or use examples? And I don’t find these API codes in the Firmware…
The picture below is from the paper.
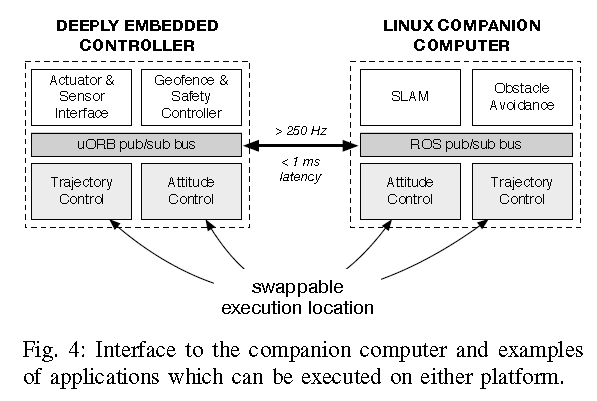
I have some questions about this picture:
- Does the linux companion computer connect to the embedded controller using mavros package(or
some similar packages)? Can the real-time needs be met? - Does the attitude control node in linux companion computer sends actuator_controls_0 ( if multicopters ) to embedded controller ?
- Does sensor data need to be passed from embedded controller to companion computer?
- Is there any video and documentation related to this experiment that using slam and PX4 attitude control on one computer?
Can someone help me? Thanks a lot!!!