Recently I tune pid of altitude control mode.
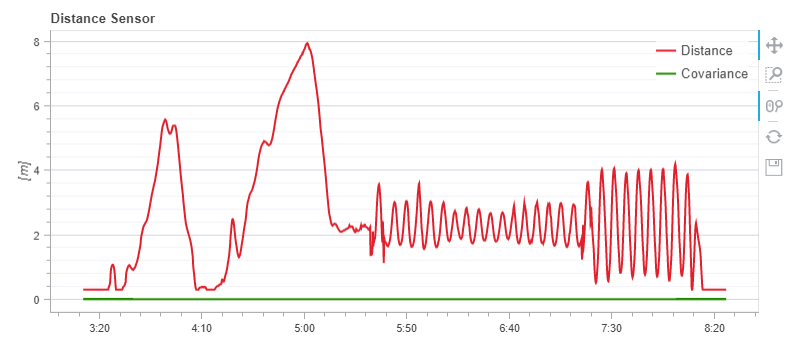
But no matter how to tune it,it looks like a flying kangaroo.
It’s bouncing up and down.

Hmmmm… Did you tried Altitude mode?
I guess you are playing for the first time with a multicopter and yes, in Stabilized mode, it is pretty hard for beginners.
In the tune tab of QGC, you should set the right “hover” throttle so it will hover @50% of your control.
For more precise tuning, you can change the PID in the Multicopter Position Control params (in the parameter tab).
Hi,AlexisTM!
Have you tuned the pid parameters of altctl?
I set the hover throttle 23%.
After that I change the pid params,but my multicopter bounce up and down in a small scope.
What kind of UAV do you have?
Are you sure you are in ALTCTL?
You should reduce your PID parameters for the position control in Z.
@AlexisTM I had the same problems,my dji450 drone is bouncing up and down, position control in Z is what kind of params?
Hey @whtcubie @garlinplus,
23% hover throttle, that looks like either a racer or a wrongly designed copter;
I usually have my copters between 35% (octocopters for payload) and 65% (IRIS with extra stuff) hover throttle. These have stable behaviour.
Keep in mind that the further from 50% the hover throttle is, the harder it is to control the copter because each step, the copter reacts more.
I would try to reduce the MAX_PWM to 50% (limits the speed to go up) and reduce a lot the MPC_xxx parameters (multicopter position control) following: https://docs.px4.io/en/config_mc/pid_tuning_guide_multicopter.html
Is the attitude control correct?
Can you do a flight in Stabilized/Manual mode and grab a log? That will tell you if you need to tune the MC_xxx parameters (multicopter attitude control).
The fastest way to fly it stable would be to decrease the torque of the prop/motor combination.