I am using ros2 with holybro pixhawk 6c.
The current firmware is v1.14.1.
I connect the jetson and pixhawk together and establish the communication using uxrce_dds.
I am trying to get the status of the AUX1 from topic “/fmu/out/actuator_outputs”.
I can get it from QgroundControl using “listener actuator_outputs”.
I will show the pwm value of AUX1 in instance 1.
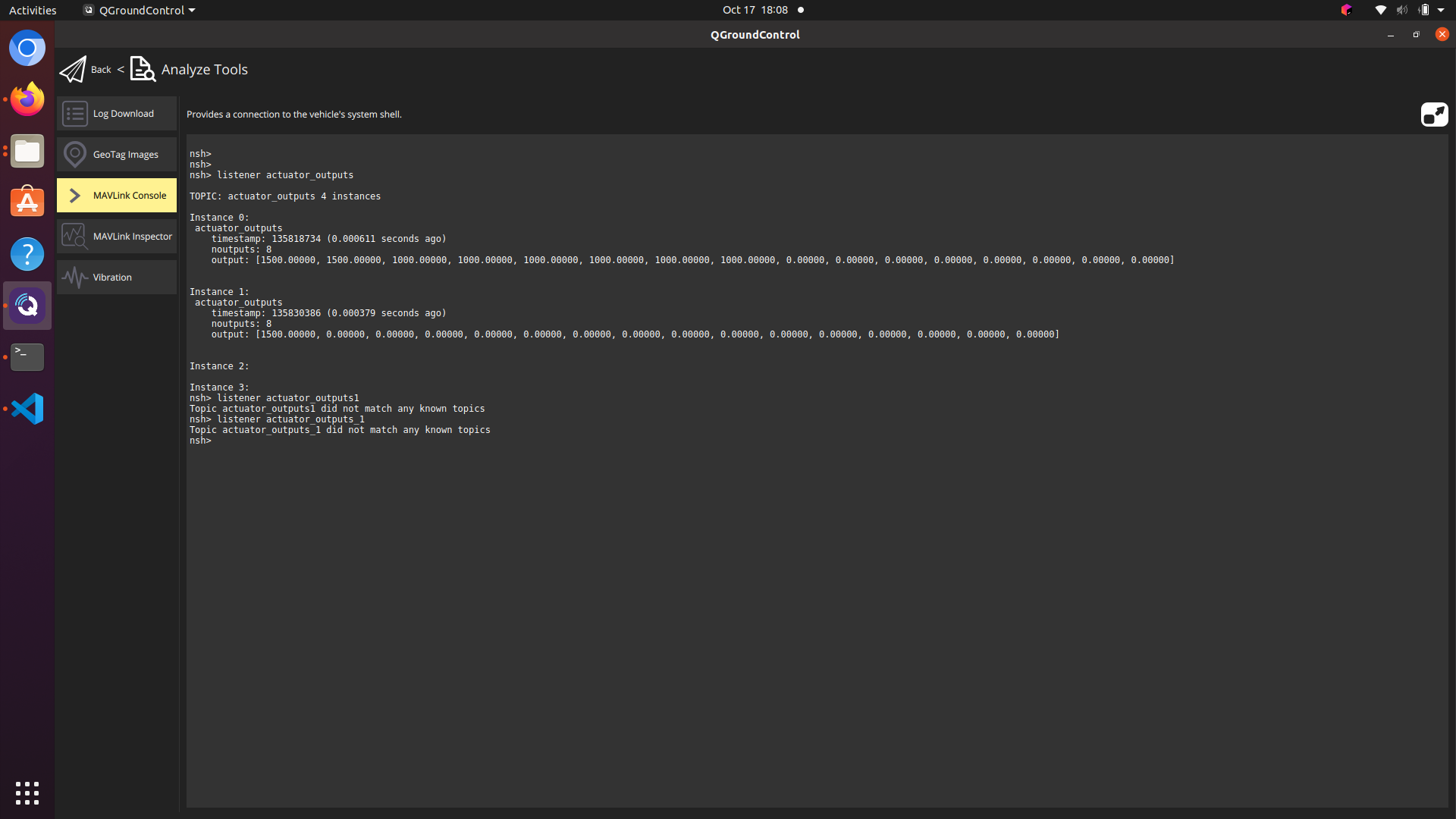
However, when I am testing it using “ros2 topic echo /fmu/out/actuator_outputs”, I can only get the data from instance 0.
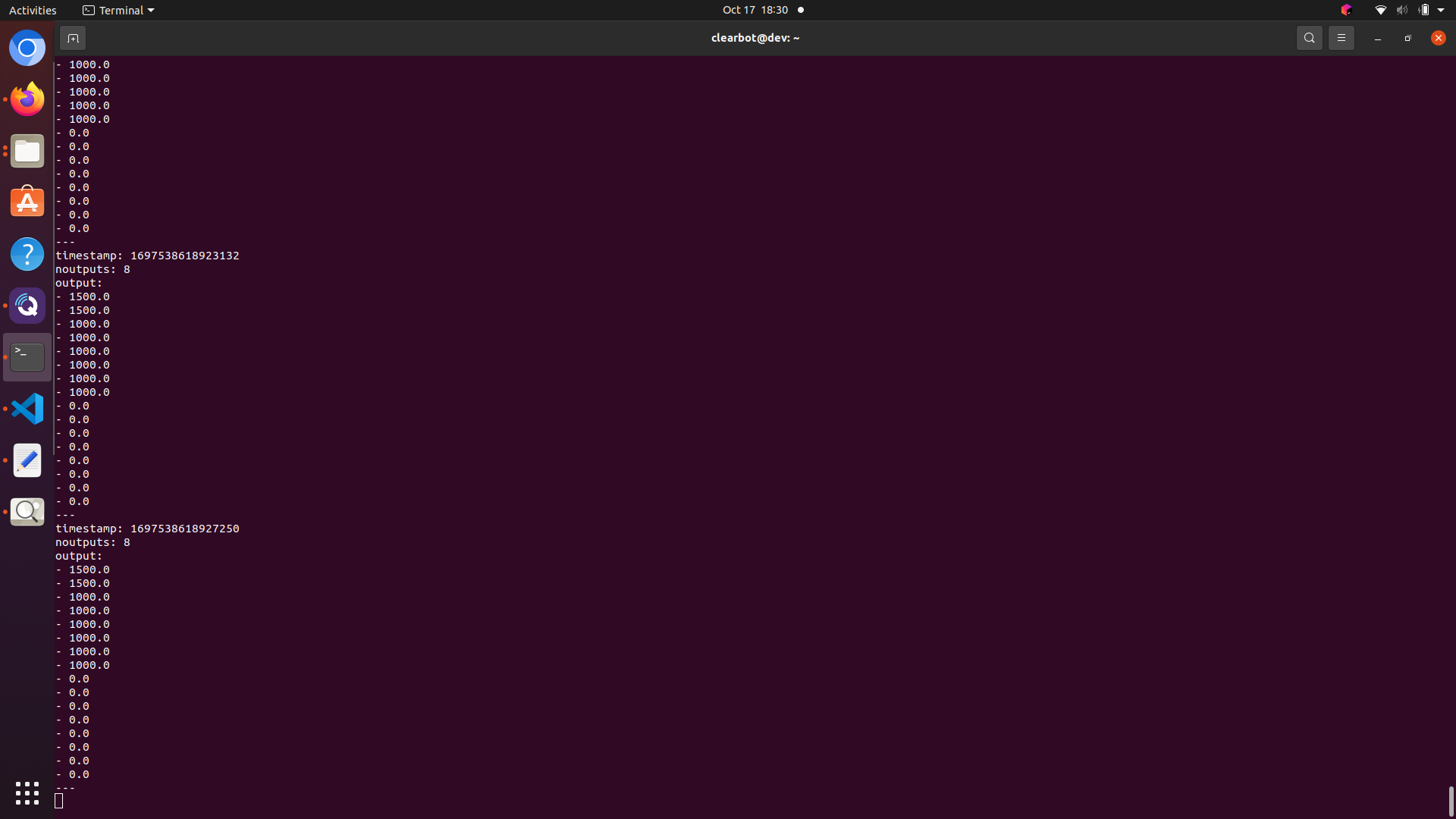
How can I get instance 1 from the ros2 topic “/fmu/out/actuator_outputs”?