Hey everybody,
trying to keep everything together in this thread (as I have made a couple of attempts on the gitter channel already)
I am trying to coomplete the steps from https://pixhawk.org/dev/ros/ground_rover
However, things seem to have changed since that tutorial was written. In the meantime I have translated the code from http://dev.px4.io/ros-mavros-offboard.html into python using rospy and can send the required messages. Still using rosrun mavros xxx to set offboard mode and arm, but that is not the problem.
So this is what I did:
- Start the Pixhawk (PX4 from master, as suggested by the tutorial)
- Start the ROS node on a Pi2, connected via USB (yes I know this is bad, didnt find reasons why though)
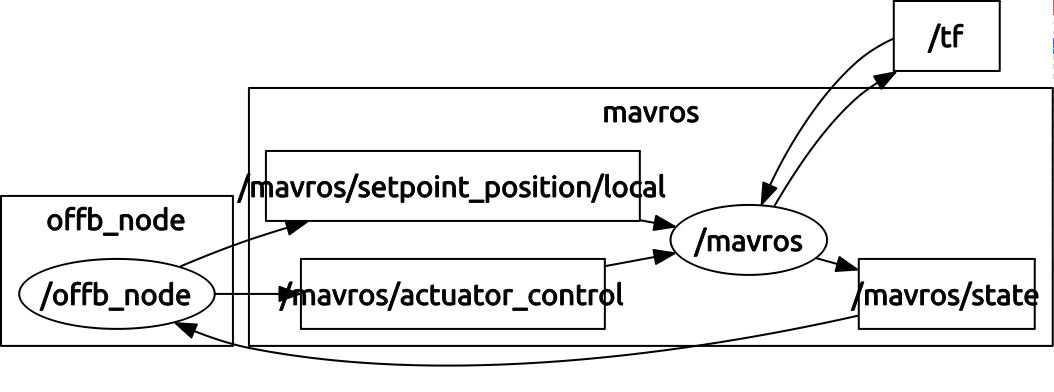
- Start publishing setpoint messages (x=0, y=0, z=2) to
/mavros/setpoint_position/localwith 10Hz - Enable offboard mode with
rosrun mavros mavsys mode -c OFFBOARD - Response of the client command:
Mode changed. - Response on the ROS node:
CMD: Unexpected command 176, result 0 - Arm the Pixhawk with `rosrun mavros mavsafety arm
- Response:
-
[ INFO] [1461696138.107446428]: FCU: [cmd] ARMED by arm/disarm component command
[ERROR] [1461696138.156739718]: FCU: DL and GPS lost: flight termination
[ WARN] [1461696138.248203461]: TM: Clock skew detected (-0.010448943 s). Hard syncing clocks.
[ INFO] [1461696138.259433207]: FCU: [blackbox] /fs/microsd/log/2016-04-24
[ INFO] [1461696138.310534615]: FCU: [blackbox] recording: 22_04_37.px4log
[ERROR] [1461696138.362274040]: FCU: DL and GPS lost: flight termination
[ERROR] [1461696139.386047750]: FCU: DL and GPS lost: flight termination
[ERROR] [1461696140.458426575]: FCU: DL and GPS lost: flight termination
* The last message keeps repeating, commands sent to the motors are ignored.
Now I really dont know where to look further - help would be greatly appreciated :slight_smile:
Thanks in advance!