I have upgraded my holybro pixhawk 6c into v1.14.1.
I am using the pixhawk 6c with a jetson Xavier through uXRCE-DDS.
When it is v1.13.3, I can control the AUX1 output through both RC_MAP_AUX1 and /fmu/actuator_controls3/in.
However, actuator_controls is removed in v1.14.1 and I need to control the AUX output in ros2 using “MAV_CMD_DO_SET_ACTUATOR” and /fmu/in/vehicle_command.
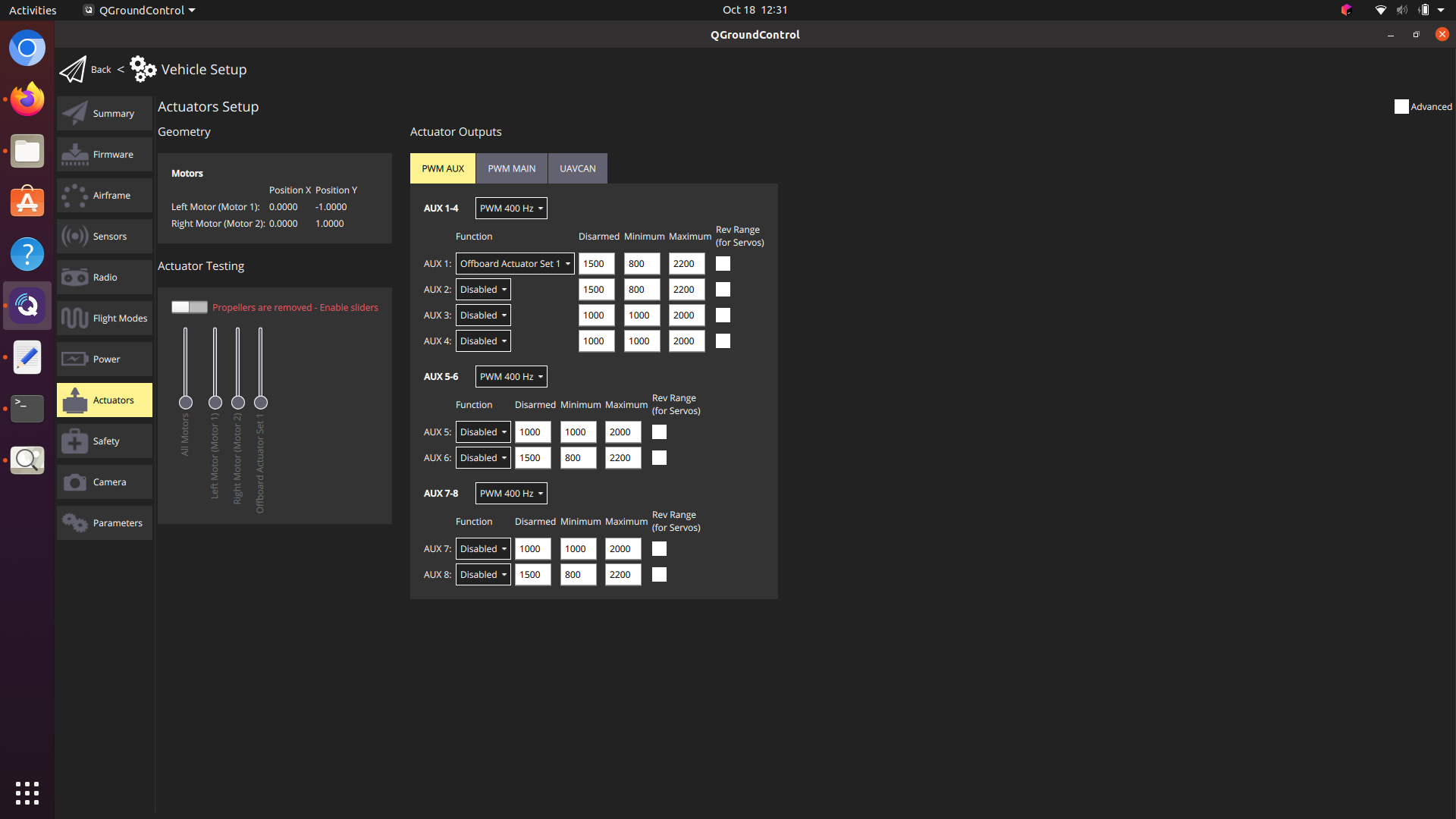
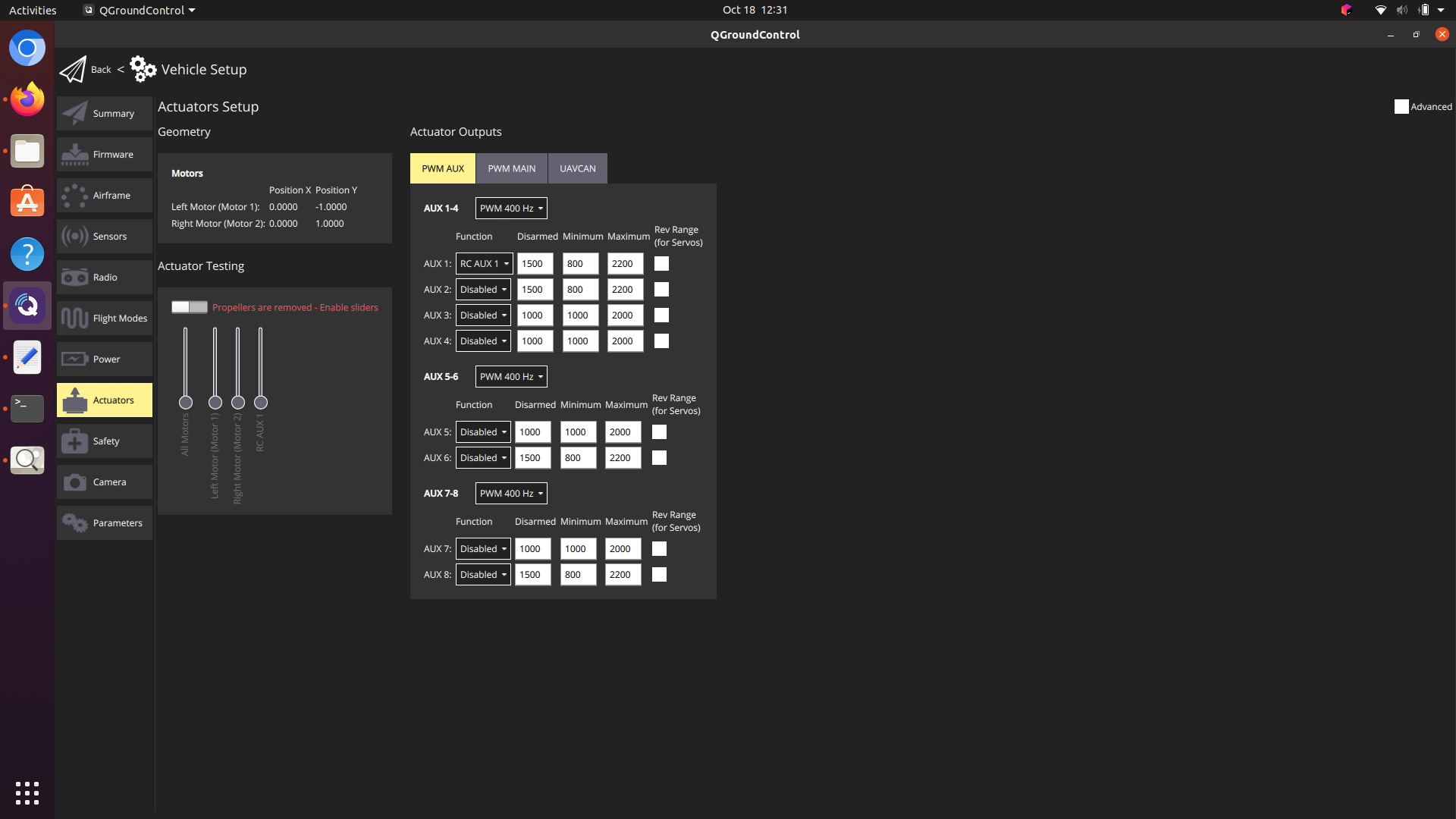
Even worse, RC_MAP_AUX1 is no longer map directly to the AUX1 output in px4 v1.14.1 firmware. The actuator output 1 will be assigned by either “RC AUX 1” or “Offboard Actuator Set 1”.
In this case, the actuator output AUX 1 is not able to be controlled by both RC and ros2.
How can I control AUX 1 output through both RC and ros2 in px4 v1.14.1?