I’m still working on getting the ECL EKF connected to my flight controller project. It’s pretty close - pitch, roll, yaw, and altitude estimation work - but I’m not getting good results for position or horizontal velocity. I’m sure that’s down to my inputs and parameters. Could someone help me with these questions? Thanks! Also, is this the first project outside of PX4 to use the ECL?
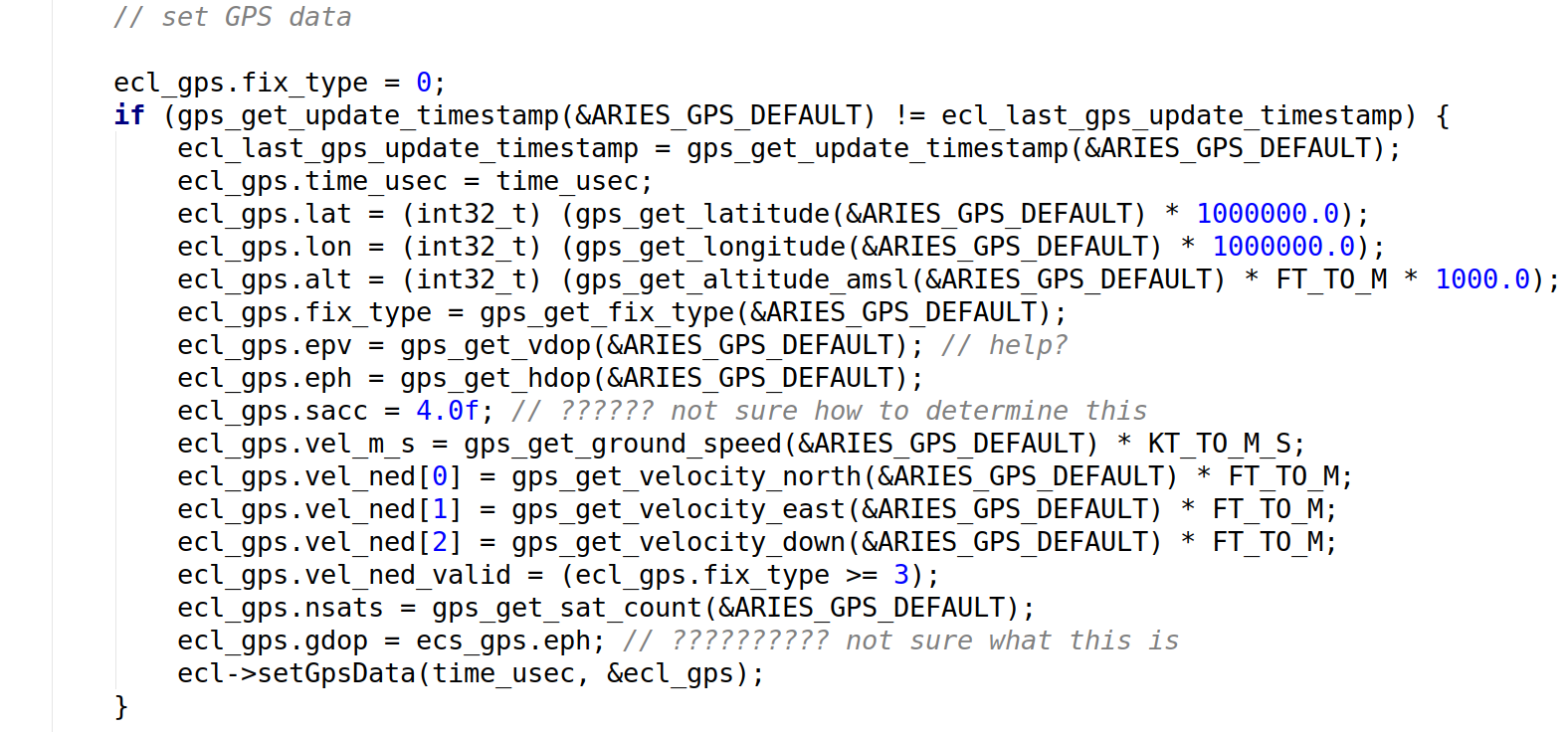
EPH / EPV / SACC GPS Parameters
What are typical values for these? Do they have a large effect on position and velocity estimates? Are they derived from GPS data, or are they parameters of the GPS itself? I’m using an M8N GPS.
Position reference
The EKF outputs position in meters, relative - I think? - to the position supplied right before params->gps_pos_body.setZero(); is called. Is this correct? And the input is in degrees lat/lon multiplied by 1e7.
Horizontal Velocity estimation
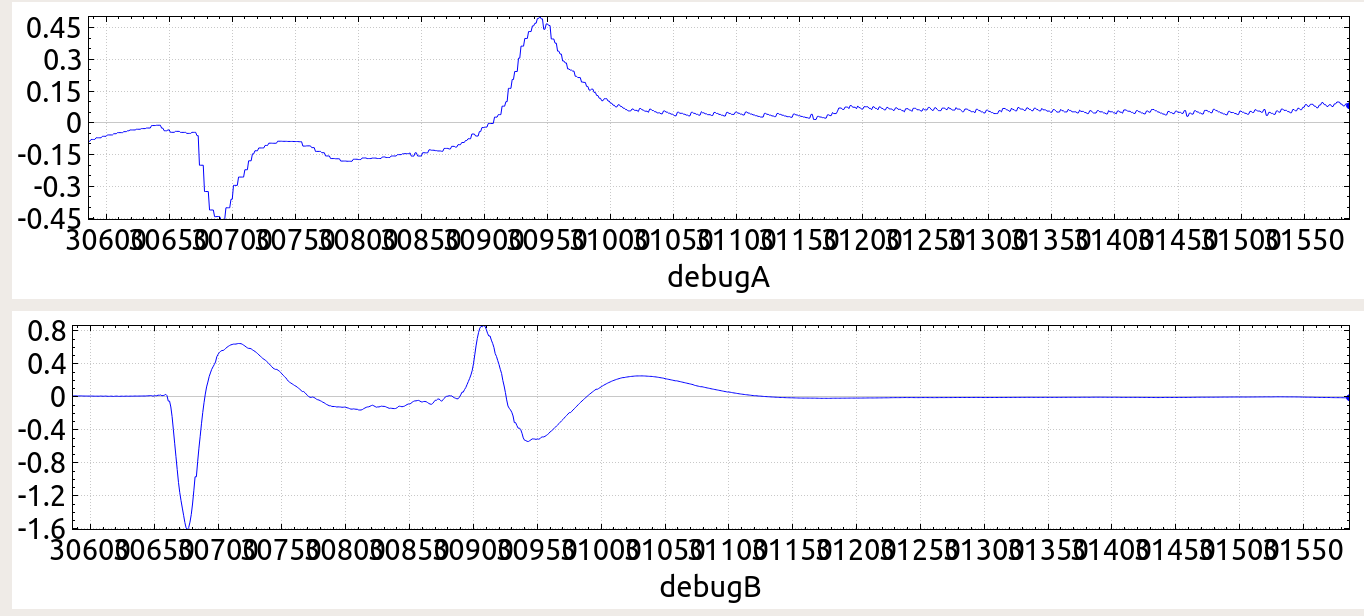
I’m noticing that the velocity and position estimates really want to track the GPS position. Especially if I test indoors with working-but-marginal GPS reception, I notice that I can move in some direction and I’ll see the position update instantly (presumably based mainly on the IMU data), but that almost immediately it jumps back to the GPS position, which isn’t moving as quickly or accurately. Is this expected behavior? Are there parameters I should adjust to tell the system how much to trust the GPS versus inertial data?
Sorry for all the questions, but I’m excited to get the EKF working after a ton of integration work!