I figured it out. The correct way to use a ROS camera on the Iris is to make use of the
macros and place the camera in
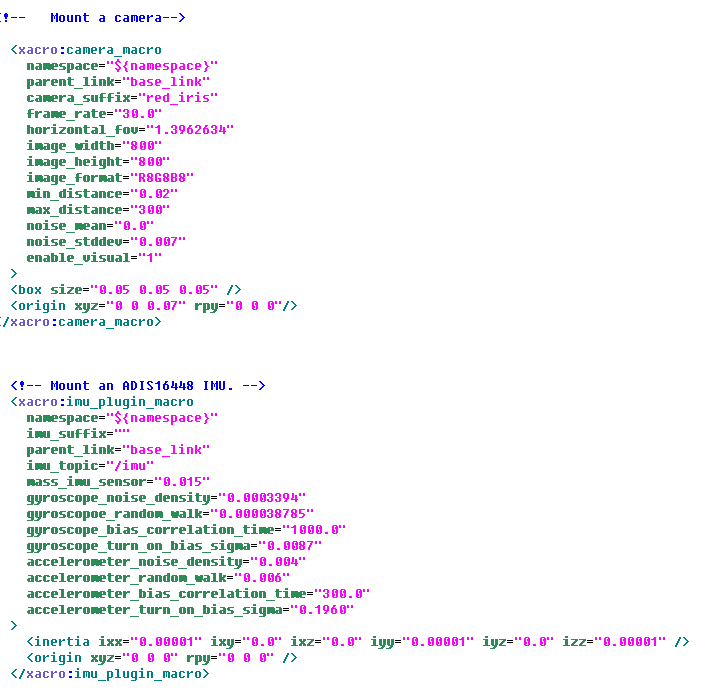
https://github.com/PX4/sitl_gazebo/blob/master/models/rotors_description/urdf/iris_base.xacro
and place it above the ADIS16448 IMU
Then you can see multiple UAVs in gazebo

Then you can view them in rviz like below

Hope this helps, if anyone is looking for this.