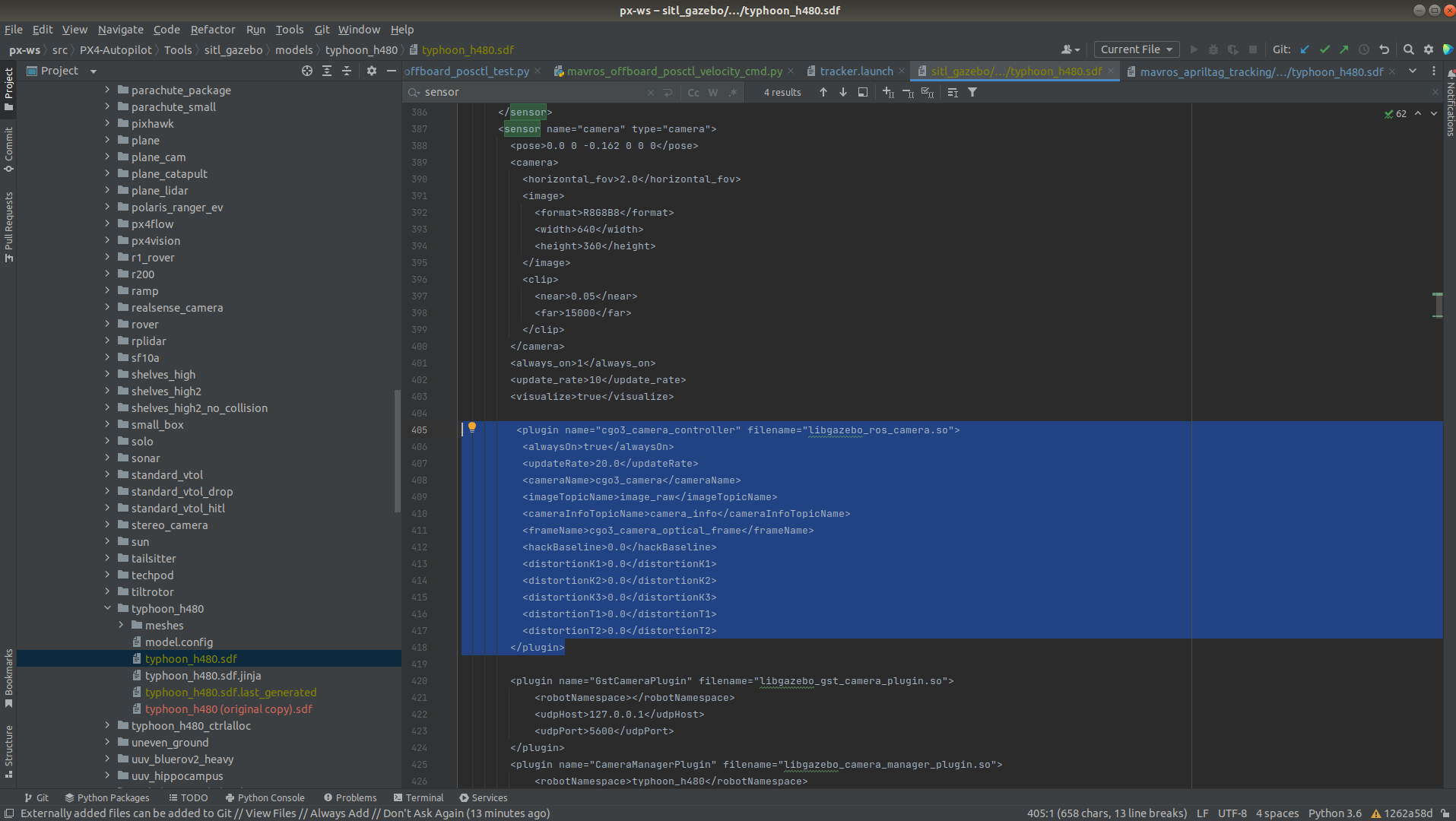
I find a work around by adding one camera in the file typhoon_h480.sdf directory: /home/user_name/px-ws/src/PX4-Autopilot/Tools/sitl_gazebo/models/typhoon_h480
<plugin name="cgo3_camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>20.0</updateRate>
<cameraName>cgo3_camera</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>cgo3_camera_optical_frame</frameName>
<hackBaseline>0.0</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
reference IRIS:
Then I can get the camera data by
In the first terminal:
cd px-ws/
roslaunch px4 mavros_posix_sitl.launch
In the second terminal:
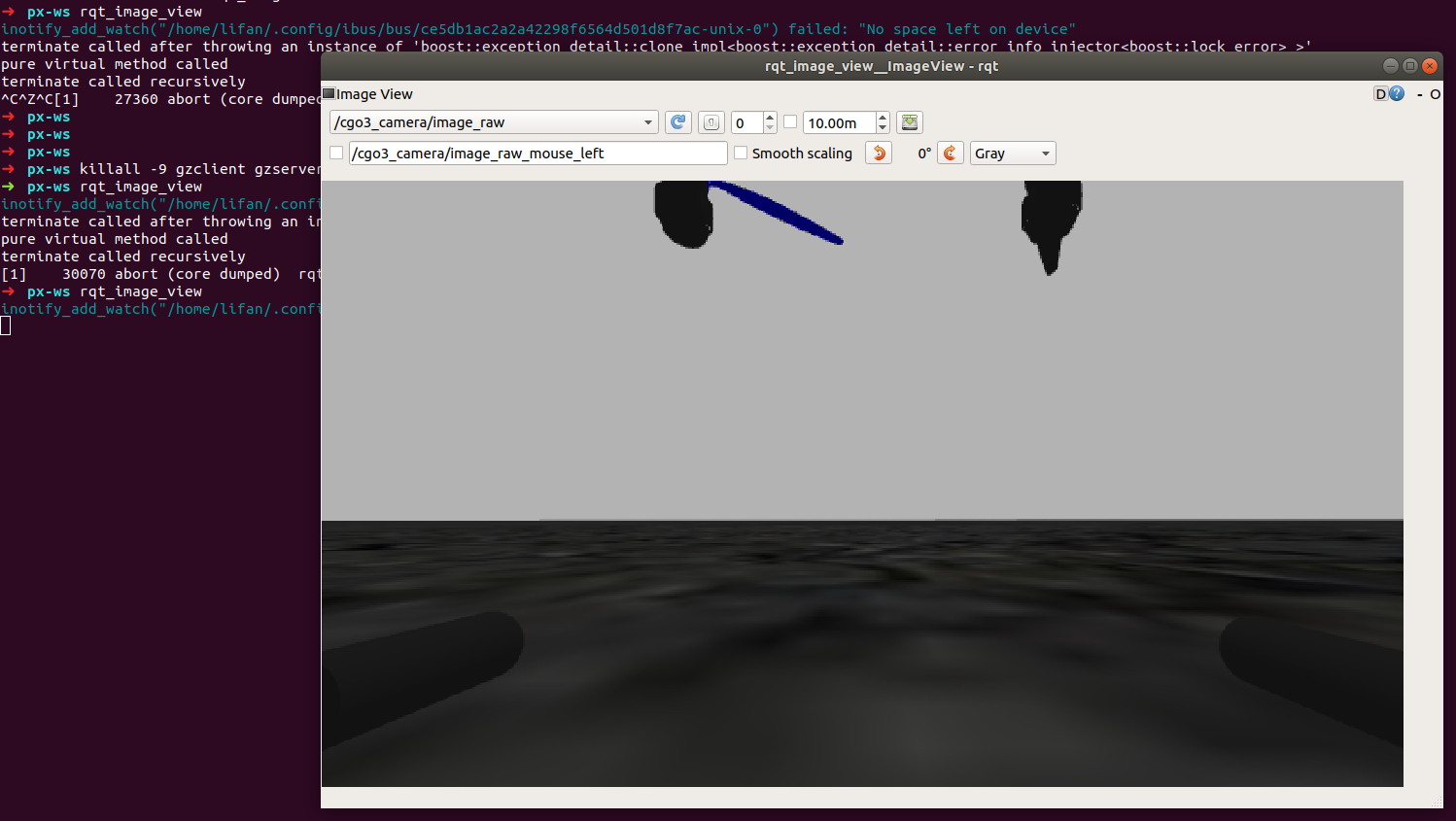
rostopic echo /cgo3_camera/image_raw
In the third camera:
rqt_image_view