Hi,
This board should still be supported by PX4, so I am thinking what could be the problem. The drone was flying and everything worked before updating the firmware.
Thanks
rroche
July 23, 2024, 4:06pm
2
Just so we are on the same page, have you tried flashing the latest main branch? can you please let us know if that works
Hi @rroche
Any updates regarding the compatibility with v1.14.3 ?
rroche
August 8, 2024, 7:26pm
5
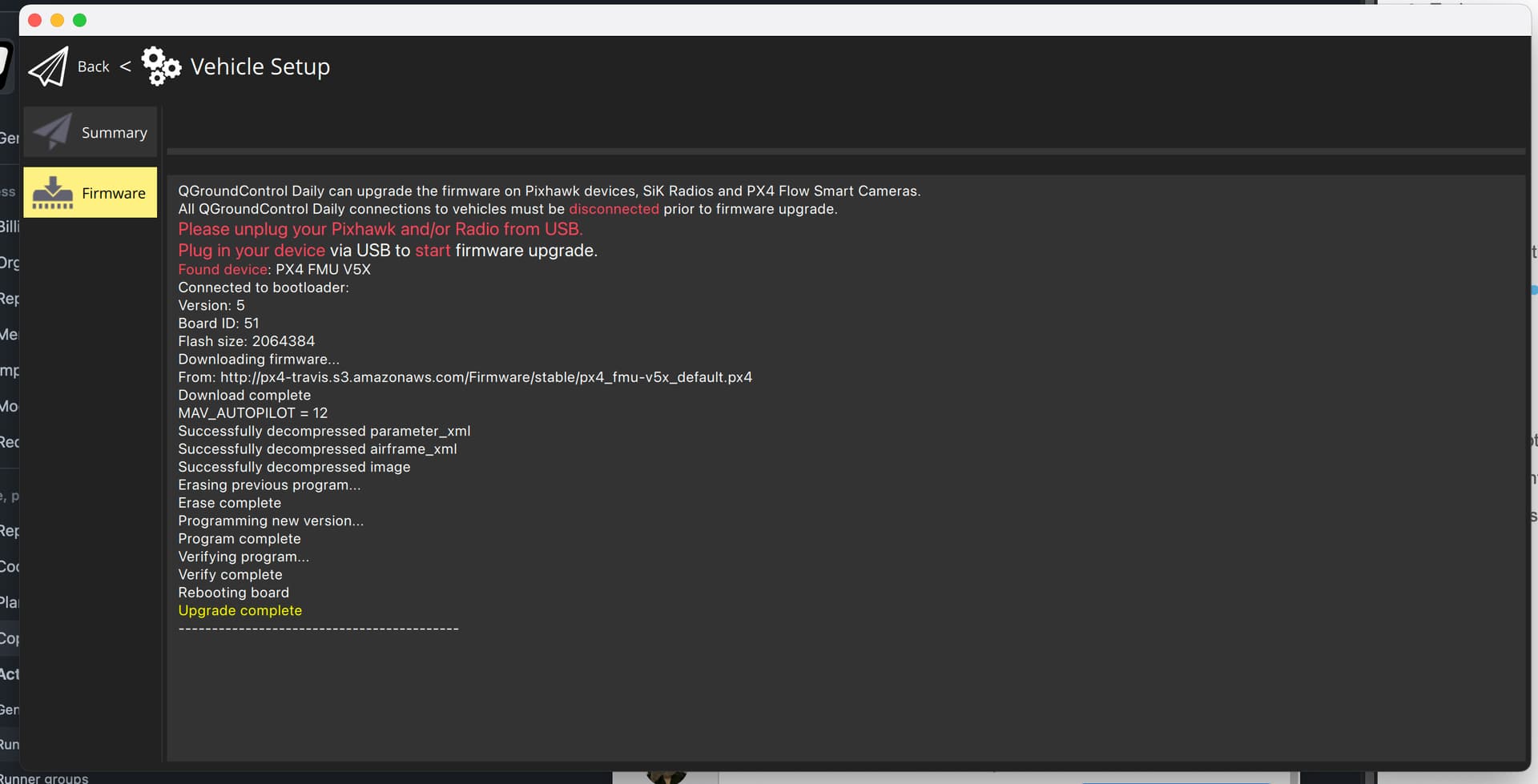
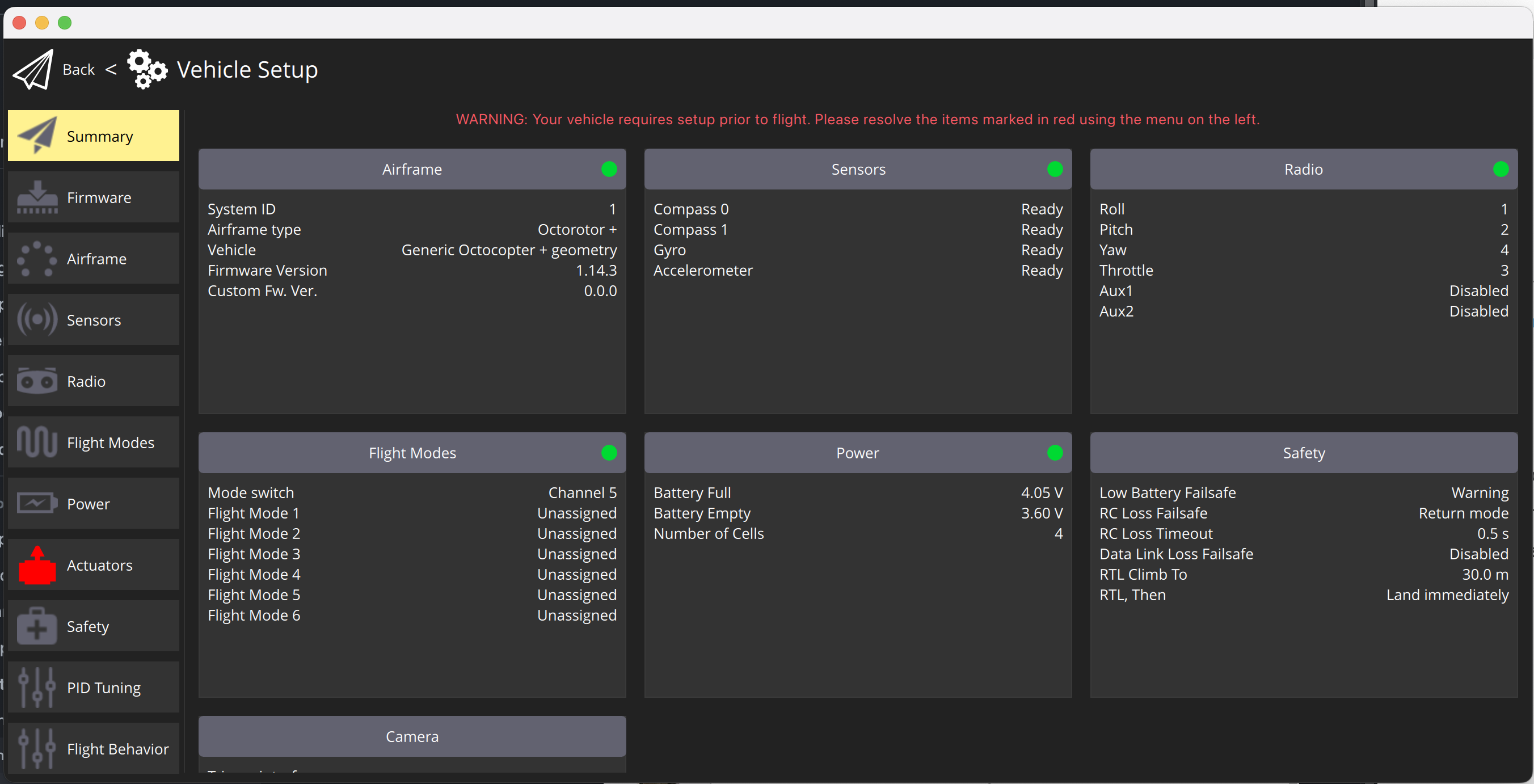
I was able to successfully update my Holybro Pixhawk 5X (FMUv5X) using QGC, and everything seemed fine until I ran dmesg on the mavlink console
NuttShell (NSH) NuttX-11.0.0
nsh> dmesg
HW arch: PX4_FMU_V5X
HW type: V5X
HW FMUM ID: 0x002
HW BASE ID: 0x000
PX4 git-hash: 1dacb4cdef2d7145754fc788fa8dc482eed74b40
PX4 version: Release 1.14.3 (17695743)
OS: NuttX
OS version: Release 11.0.0 (184549631)
OS git-hash: de41e7feaeffaec3ce65327e9569e8fdb553ca3d
Build datetime: May 30 2024 03:31:42
Build uri: localhost
Build variant: default
Toolchain: GNU GCC, 9.3.1 20200408 (release)
PX4GUID: 000200000000203335375942500f001a0036
MCU: STM32F76xxx, rev. Z
INFO [param] selected parameter default file /fs/mtd_params
INFO [param] importing from '/fs/mtd_params'
WARN [parameters] ignoring unrecognised parameter 'SYS_USE_IO'
INFO [parameters] BSON document size 1832 bytes, decoded 1832 bytes (INT32:29, FLOAT:57)
INFO [param] selected parameter backup file /fs/microsd/parameters_backup.bson
Board architecture defaults: /etc/init.d/rc.board_arch_defaults
Board defaults: /etc/init.d/rc.board_defaults
Loading airframe: /etc/init.d/airframes/9001_octo_+
INFO [dataman] data manager file '/fs/microsd/dataman' size is 62560 bytes
INFO [px4io] IO FW CRC match
Board sensors: /etc/init.d/rc.board_sensors
INFO [ina226] Failed to init INA226 on bus 1, but will try again periodically.
ina226 #0 on I2C bus 1 (external) address 0x41
INFO [ina226] Failed to init INA226 on bus 2, but will try again periodically.
ina226 #1 on I2C bus 2 (external) address 0x41
WARN [SPI_I2C] ist8310: no instance started (no device on bus?)
bmp388 #0 on I2C bus 4 (external) address 0x77
bmp388 #1 on I2C bus 2 (external) address 0x76
ekf2 [979:237]
Board mavlink: /etc/init.d/rc.board_mavlink
Starting Main GPS on /dev/ttyS0
Starting MAVLink on /dev/ttyS6
INFO [mavlink] mode: Normal, data rate: 1200 B/s on /dev/ttyS6 @ 57600B
Starting MAVLink on ethernet
INFO [mavlink] mode: Normal, data rate: 100000 B/s on udp port 14550 remote port 14550
INFO [rc_input] valid device required
ERROR [rc_input] Task start failed (-1)
INFO [logger] logger started (mode=all)
INFO [uavcan] Node ID 1, bitrate 1000000
NuttShell (NSH) NuttX-11.0.0
nsh> WARN [mavlink] no broadcasting address found
WARN [health_and_arming_checks] Preflight Fail: Accel Sensor 0 missing
WARN [health_and_arming_checks] Preflight Fail: ekf2 missing data
WARN [health_and_arming_checks] Preflight Fail: Gyro Sensor 0 missing
WARN [health_and_arming_checks] Preflight Fail: Compass Sensor 0 missing
WARN [health_and_arming_checks] Preflight Fail: Accel Sensor 0 missing
WARN [health_and_arming_checks] Preflight Fail: ekf2 missing data
WARN [health_and_arming_checks] Preflight Fail: Gyro Sensor 0 missing
WARN [health_and_arming_checks] Preflight Fail: Compass Sensor 0 missing
WARN [health_and_arming_checks] Preflight Fail: Accel Sensor 0 missing
WARN [health_and_arming_checks] Preflight Fail: ekf2 missing data
WARN [health_and_arming_checks] Preflight Fail: Gyro Sensor 0 missing
WARN [health_and_arming_checks] Preflight Fail: Compass Sensor 0 missing
ERROR [ekf2] start failed (-1)
nsh>
I will report back with my findings
rroche
August 21, 2024, 9:03pm
6
Hey @salmarc we found the problem and will be deploying a fix, if this is urgent ping me in Discord and I will help you with a build that will fix it for you
Hi @rroche , sorry for the delay but i was on vacation.