I have a 550mm hexa that I’ve been working on for a few years, sat dormant since maybe 2018.
I recently bought a Holybro Pixhawk 6c and have been trying to get it up and running again.
This Sunday 9 Oct. I performed two quick flight tests after getting new props (APC 10x5, balanced) and a new battery. My prev. test flight was 5 Oct with a similar battery, and Graupner 10x5’s. It was a quick up-and-down test that day, but performance was good.
On Sunday however, weird things happened.
First flight [poor performance]
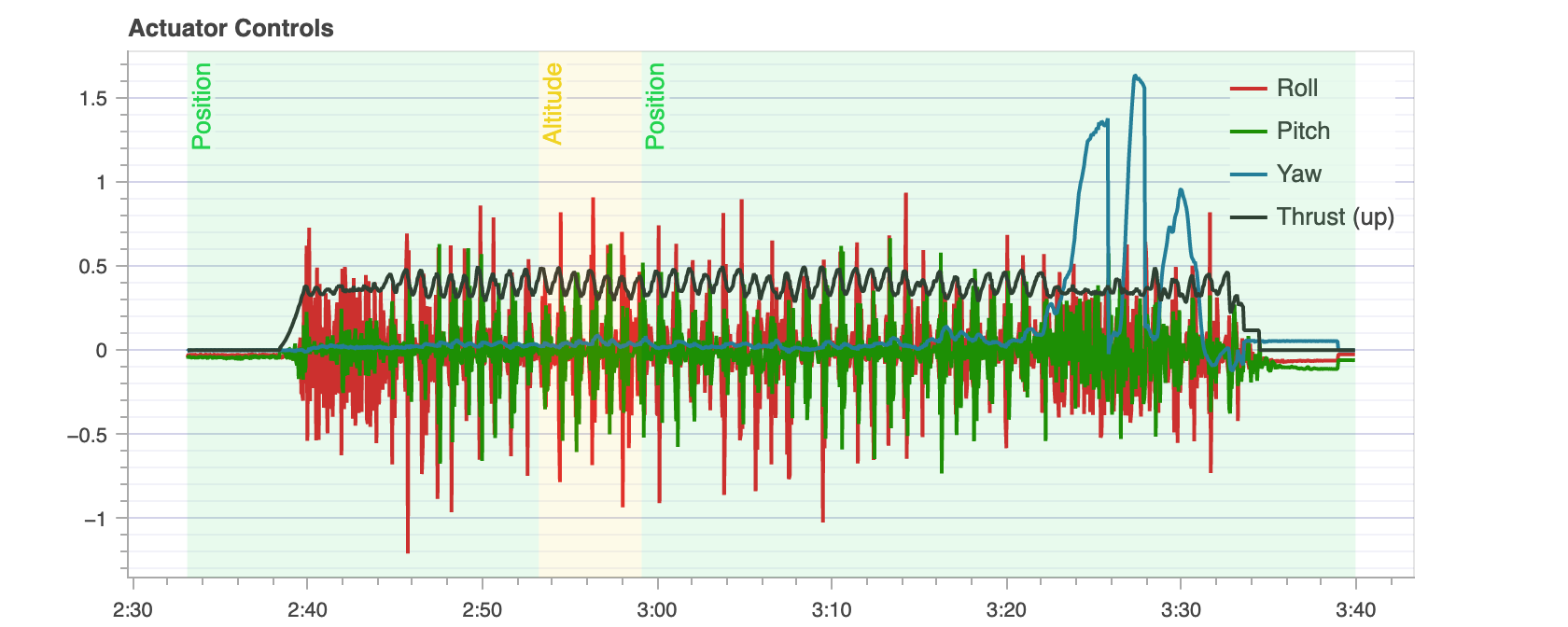
See full log here
Take-off was good and stable for a few seconds, but shortly after takeoff the thrust started oscilating without my input. The thrust would oscilate up and down and the aircraft would jump around (maybe 2-4ft each oscillation of power), with a frequency of maybe .5-1hz. This was in position mode. About 40s into the flight, the aircraft randomly started rotating along the yaw axis, and then I brought it to a landing (smoothly).
Second flight [crash]
See full log here
After an OK but sub-optimal first flight, I did a power cycle, and tried again. Take-off was very jumpy (trying this time in stabilized mode), and quickly noticed rocking from side-to-side (seemingly along the roll axis) that was worsened with throttle. Control was hard to maintain with all the side-to-side and up-and-down oscilations. Seeing performance was really really poor, I tried to bring it in to a soft landing but the throttle was too tricky to get a grip on, and the aircraft slammed into the ground about 17 seconds into the flight, ejecting the battery. Because of this rude ending to the flight, I’m unsure if the log file captures the ending accurately
–––––––––––
Any help understanding what may be wrong, and how to tune my hexa for better performance would be greatly appreciated!!
If it helps, here’s an idea of the hardware I’m running with.

This is my first log analysis post – please advise if I can do anything better in terms of process or format. It is too late now, but I see that my test flights were not done in accordance with the pinned post, but actually fairly similar in terms of my calibration and bench tests prior to flying.