Hi All
New over here with PX4,
Piloted my 1st drone and it crashed on its maiden.
Specs:
Frame: Tarot X690
Autopilot: V6XRT
Firmware: V1.17.0 Alpha
ESC: Xrotor 40A Pro
Motor: MN5008
Prop: 16inch
AUW: 2.7kg
Commands.
Drone was Armed through GCS; took off in stabilize mode.
Throttled up to 40%; drone suddenly shot to the sky.
Throttled downed to 0%; drone continued with climb.
Kill switch engaged; drone crashed
I am at loss over here; not sure where I went wrong.
Can someone help me out investigating this and how to prevent it in the future.
Thanks
https://review.px4.io/plot_app?log=2cdce15e-191c-4541-bf04-d8d5496a9cd3
farhang
December 21, 2025, 11:24pm
2
Hello,
sorry to hear about the crash,
Is there a reason you were trying to do stabilized flight? I am not sure how comfortable it is to fly stabilized with this size drone.
It also seems like you did not have all params synced with your ground station.
Did you follow this guide:
Hi
Since it was the first flight, I wanted start with stabilize mode to see if the drone flew okay, it was supposed to be a 30 second hope, followed by loiter mode.
I got a all Ready to fly status so I assumed all prams were synced.
I did follow the guide.
Either its something to do with hardware or firmware (i know its broad, yet to narrow it down)
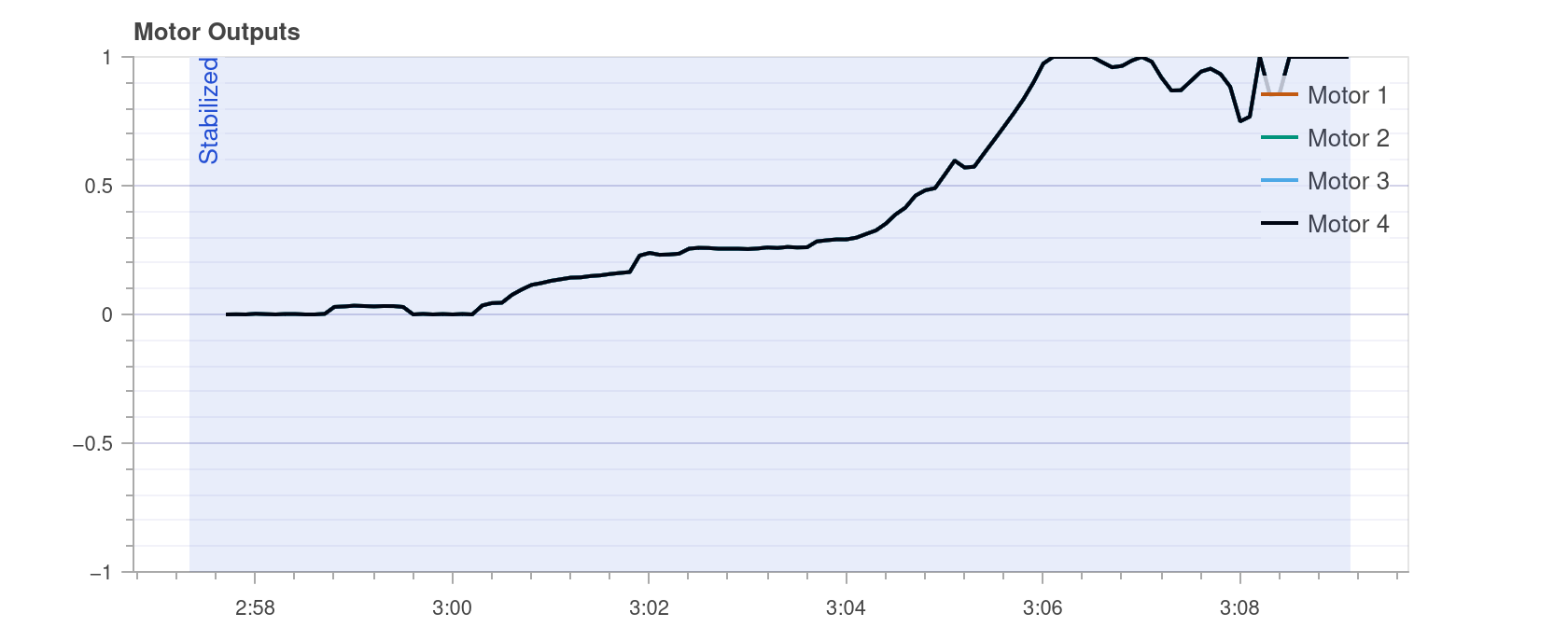
What’s your motor configuration in QGC? Why do they all have the same output? That’s suspicious.
I’m using a Quad X configuration.
Yeah the motor output looks suspicious.
I had no control over the drone, it just went 100% throttle on the motor even when i was 0% on CH3.
Check the actuators tab in QGC. Maybe take a screenshot of it and share it here.
I checked the actuators tab, I am unable to perform the test, it doesn’t arm.
For now I’ve re flashed the latest stable built and hoping to resume flights sometime next week.
Please provide a screenshot of the actuators tab. And if it doesn’t arm, click on the top left where it is green/yellow/red and check what is valid and what is not ok.
The error message I used to get was X/Y position control error.
So it wouldn’t arm, unless I forced armed it from the status bar.
As of now I have re-flashed the V6XRT with the stable firmware and all things are working well now.
I was able to conduct a short flight on stabilize, altitude and position mode.
The drone needs tuning other than that haven’t encountered any issues.