I did a very short flight, up about a meter and back down, and the drone wasn’t disarming and didn’t detect that it had landed, due to a high vertical velocity. For some reason, the estimator thought that the drone had a positive vertical velocity and an increasing altitude even though the drone was on the ground.
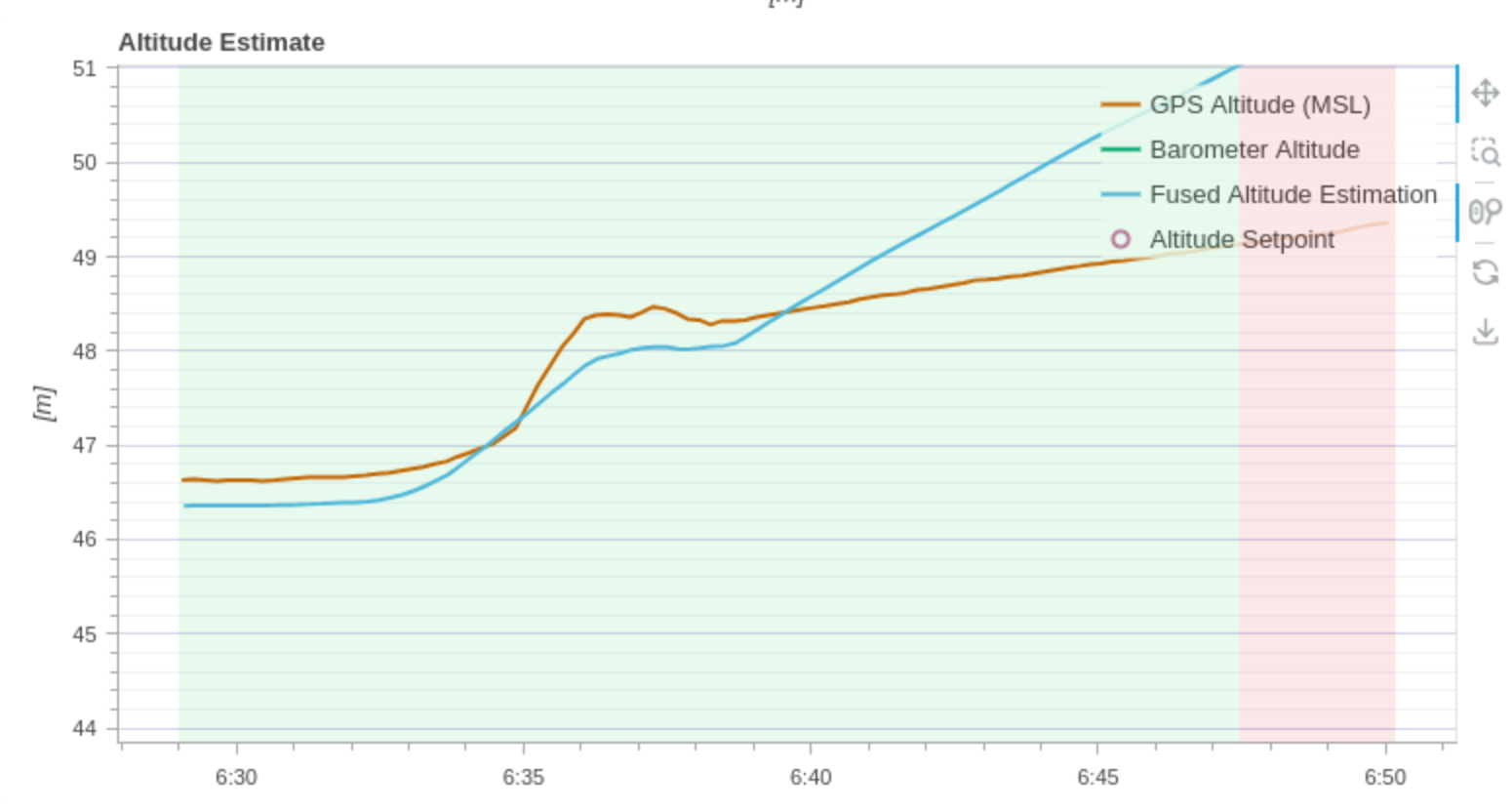
It did appear that the GPS was measuring that the drone was increasing altitude (likely some GPS drift/error), however, what I’m confused by is why the altitude estimate is increasing quicker than the GPS altitude:
It looks like also the attitude was diverging at this point. I’m not sure why yet.
Was this the first flight or was the drone flying fine before this? And did you notice anything about the landing? Was it a hard landing or did it tip over or anything like that?
This isn’t the first flight, the drone was flying okay before this. It has a little bit of ‘jumpiness’ and general altitude instability, which I had assumed was related to the relatively high amount of vibration on the airframe. But here the estimate is diverging with the drone on the ground. Maybe the vibration in the short flight triggered the divergence and it continued thereafter?
It looks like the height estimate diverging steps in the docs are out of date, as the innovations topics are no longer called that - do you happen to know the correct topic names?
Nothing noticeable in the landing, was relatively soft in my memory.