MotorsX8 coaxial multirotor Drone crashed during its 1st flight test. What could be the possible problem that I need to check before I perform another flight test for this drone?
I followed the PX4 guidelines in the Qgroundcontrol.
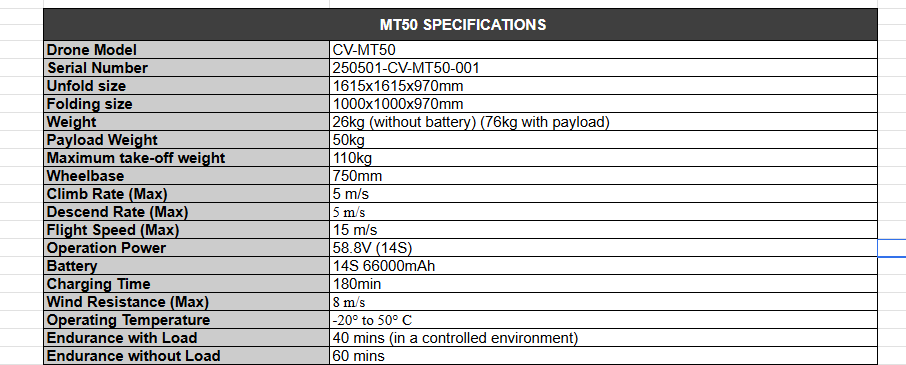
I was able to configure and tune drones with total weight of 10kg ( quadrotor Drone) without problem. but this heavy drone that can carry of upto 50kg fails on its 1st flight. We have done calibrations too before flight test.
What could be the problem and what should I be looking for?
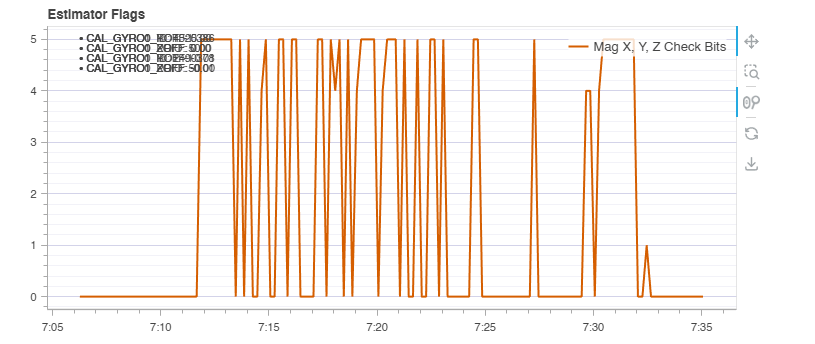
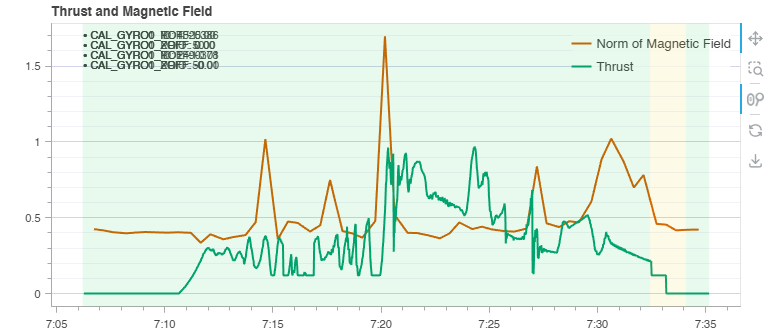
Looking at thrust (current to motors) vs mag field is very correlated, this is bad.
This will casue the EKF2 internal estimator to get wrong readings and ignore the magnetometer.
Most likely, the motor cables are too close to the MAG. I would suggest using an external (e.g in gps) or standalone.
The orange should be mostly flast, only 5-15% changes.
I haven’t done the math but with such high potential thrust you might be running into the problem of not being able to give low enough thrust on the motors. The motors have to spin a certain speed to not stall or produce uneven lift. There is also a minimum thrust MPC_THR_MIN and MPC_MANTHR_MIN
One of the best tips I can give you is to build a good testing rigg where the drone can be attached and spin withuot damanging anything.
It can be as easy as a steel bar where the drone can only rotate in 1 way.
This will let you test props direction, thrust, mag, some initial flight stability etc before doing real world tests.
This is VERY large, costly and dangerous drone and the according tests have to be done
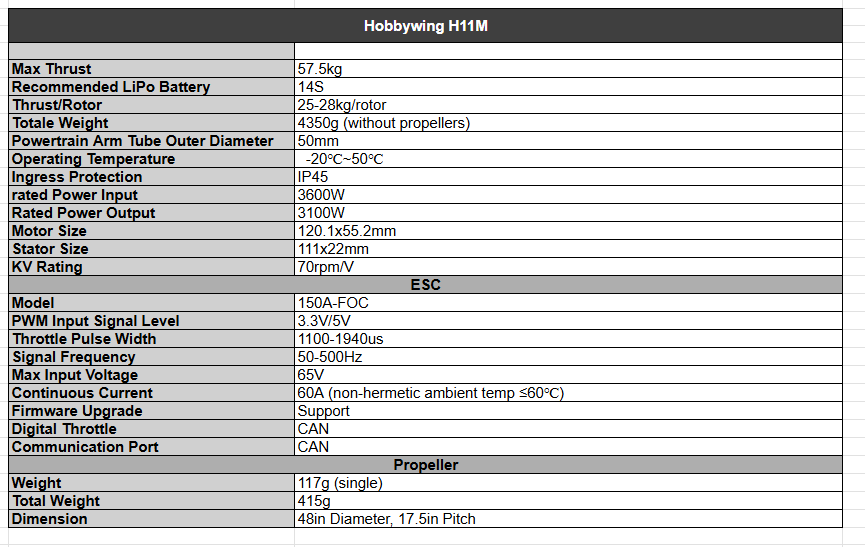
Large drones create alot of noise, both on gyro and acc. There needs to be sufficient filtering, often both hardware and software. Motors are only 70 KV meaning they produce very low frequency noise, especially on low throttle. Those blue dampener might be too stiff.
Gyro filters too high to filter noise atm, try IMU_DGYRO_CUTOFF = 12Hz, IMU_GYRO_CUTOFF = 20Hz, prob need to calculate for best performance but it is a start. Lower accel filter aswell IMU_ACCEL_CUTOFF = 10`
Notch filters (RPM based) could help alot (requires DSHOT telem or CAN telem). They allow higher LP filters for less delay while still filtering well.
With large propellers and linear throttle ESC (usually all are) the throttle to thrust relationship is not linear. This creates a huge effect at low and high throttle. I would suggest setting THR_MDL_FAC = [0.7,0.85]. Here is some good info: Tuning Process Instructions — Plane documentation
my ordered propellers for this drone has not been delivered also the hinges on its arm.
but for now Im going to re-arrange the wiring cables especially the arrangement of the components in the top plate. Ill also do some drain test making sure vibrations and electrical interference is reduced as much as possible.
I looked at the specification and watched the recorded flight test and I think one of the major problem is the power lost. I seeing that in the video, the motor is losing power when trying to lift up. then base on the specification of the motors which Hobbywing H11MD it really is needing larger battery packs with higher Discharge rate since at the time of the video the Drone’s battery being used is 14s 30Ah - 5c .
Currently Im looking for a Battery pack that is 14s 66Ah 10c that can still fit in the battery cage so I dont need to modify the cage. Other than that I have already set parameters based on your suggestion and research on the documentation