Hi!
I’m struggling since some time troubleshooting two issues what I have with my drone. Here is a log of the last test flight: https://review.px4.io/plot_app?log=91d7d73d-4546-4c54-a297-62d356249960
Problem 1: the drone often rejects arming because it has GPS accuracy/drift issues. The GPS settings are all default (v1.15) and I’m using a Holybro M9N module. Even in an open field far away from civilization with 15 satellites and 3D fix it struggles. In the attached log it also shows that this caused a failsafe. The drone was just told to hover but when failsafing it landed more than 5 meters away from the hover position. Both FC and GPS module are mounted at 35° pitch so I configured this for SENS_BOARD_Y_OFF. In the simulation it works flawless…
Problem 2: the mavlink connection goes through a RFD 868x module on default settings. However even when standing a few meters away from it I get 95% packet loss and the communication barely works. The antenna is 10 cm away from motor cables and 2 cm away from the battery (DC current shouldn’t be a big issue I assume?). This telemetry unit is recommended by the PX4 docs so I thought it should work without issues. I also didn’t change any GPS0_X / MAV0_X settings (it’s connected to GPS0).
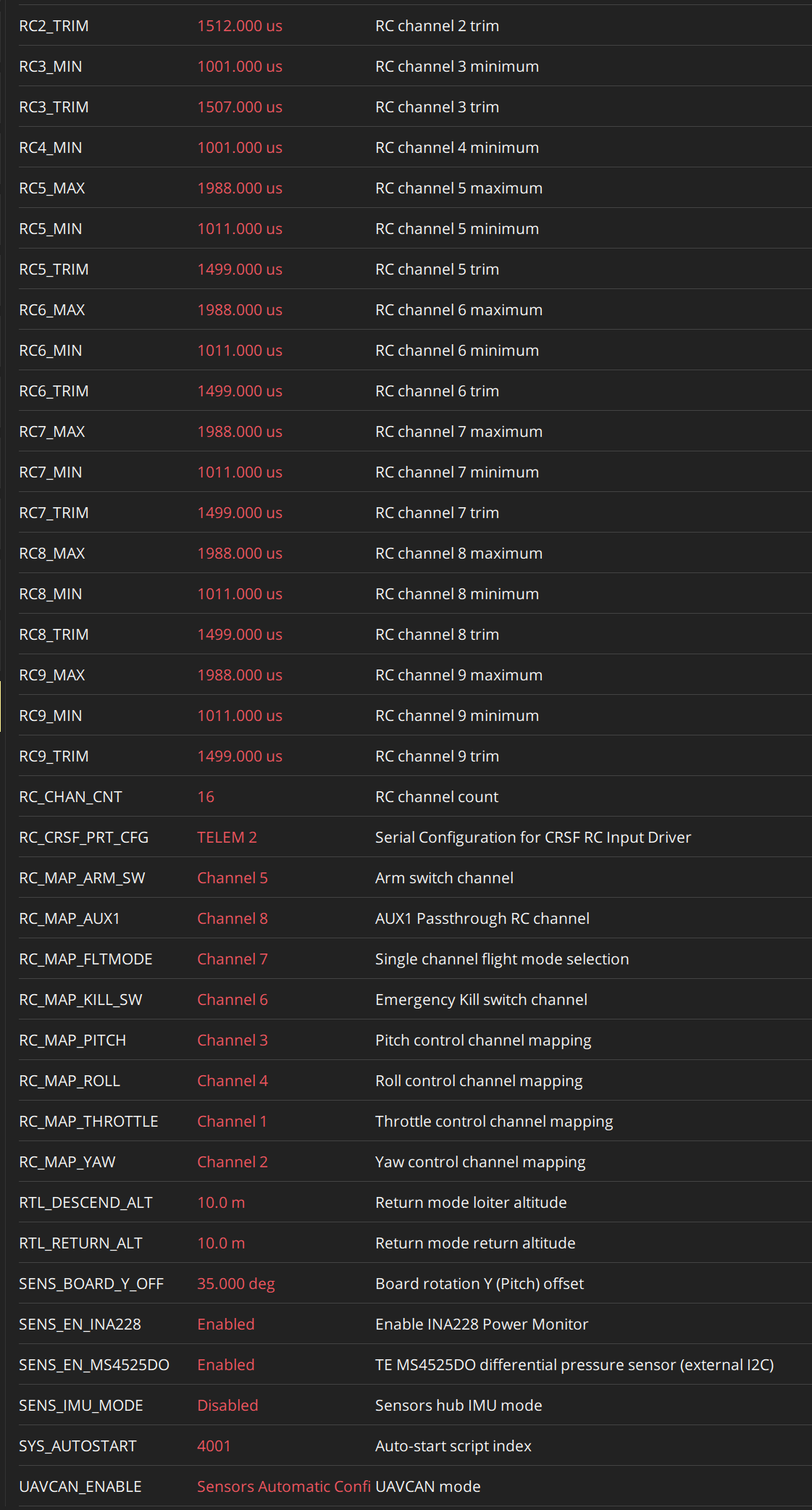
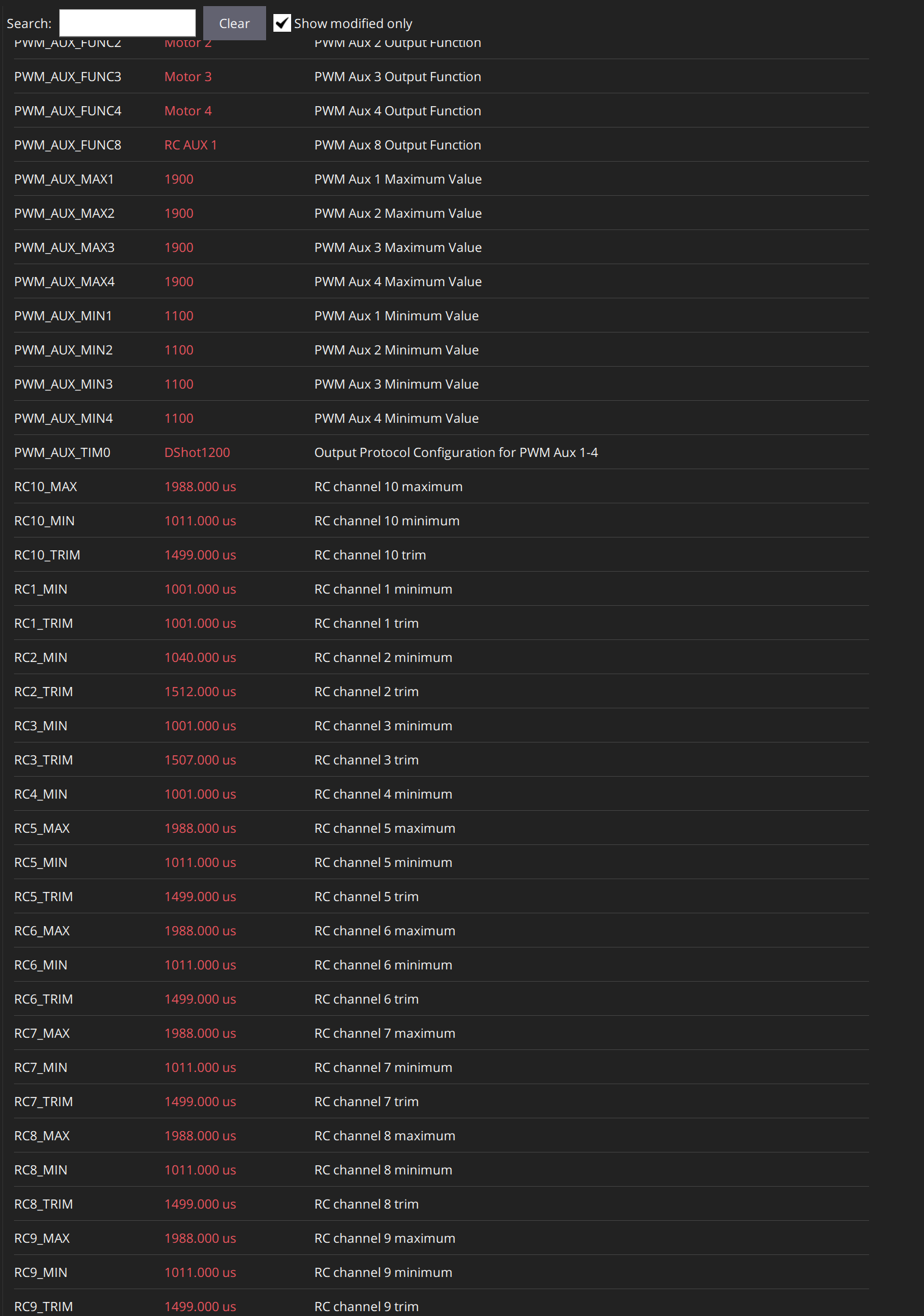
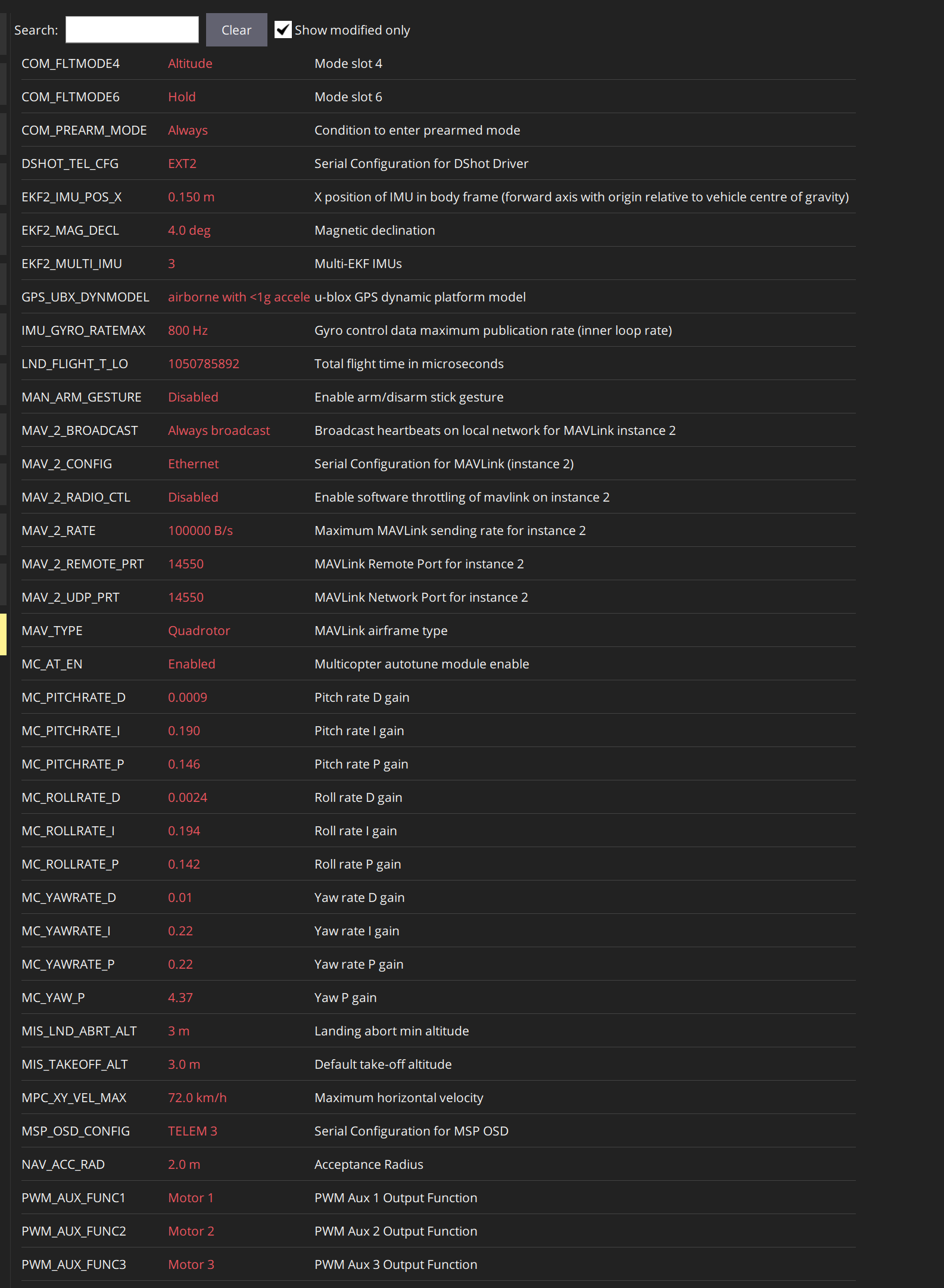
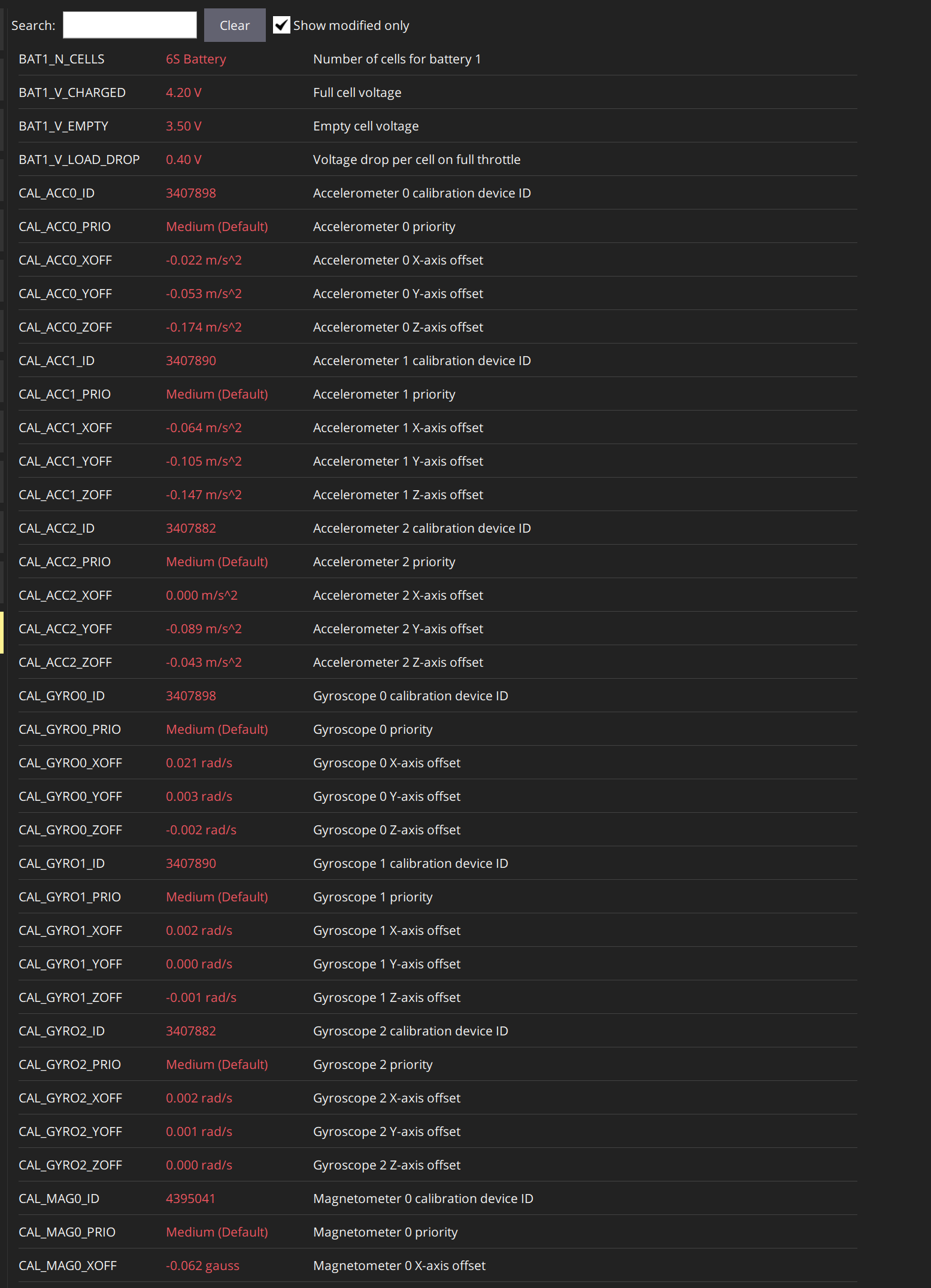
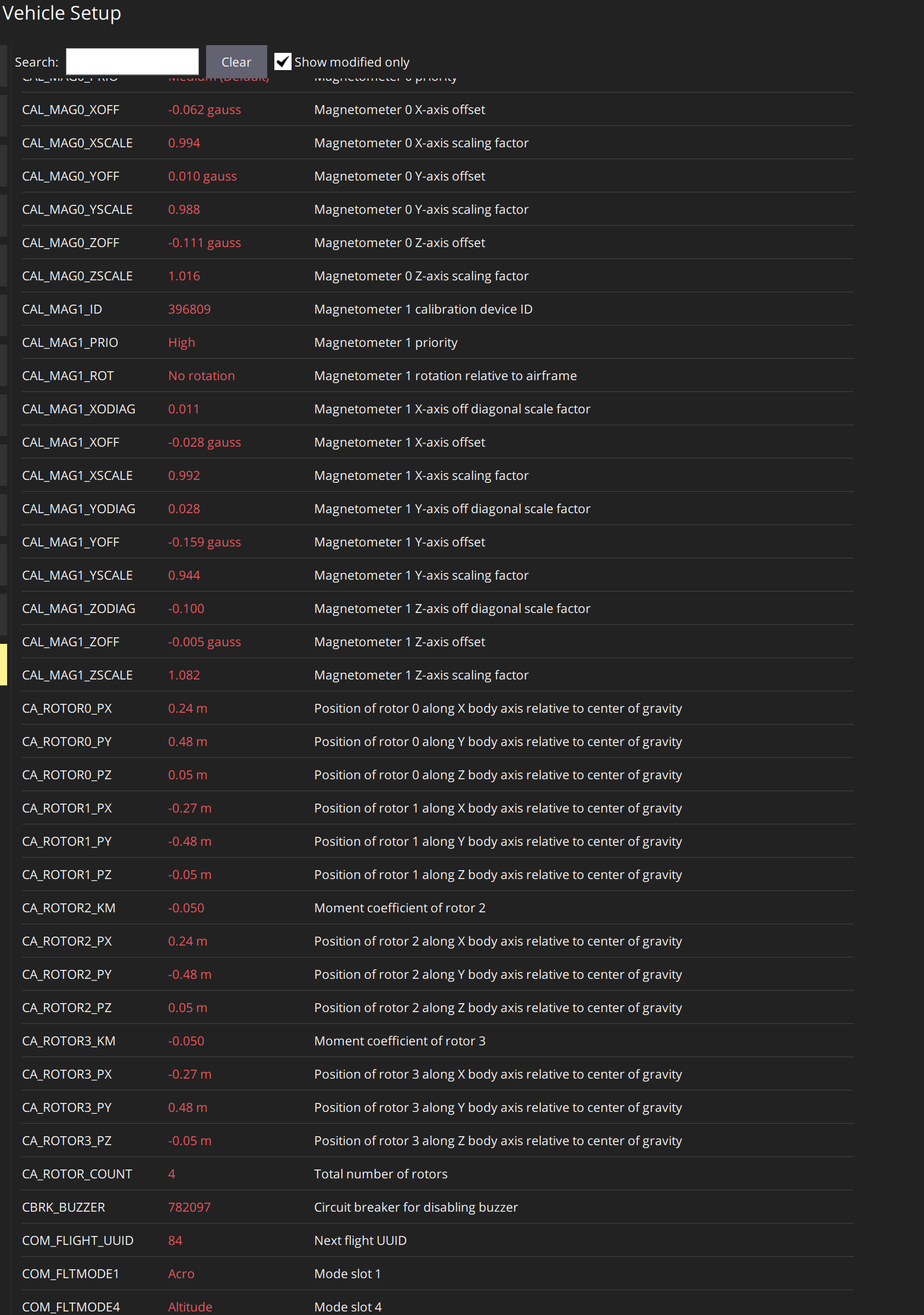
For completeness I also attached a list of all parameters that are marked as “modified” in QGC.
I’d appreciate any help!
Thanks! ![]()