Hi! I´m trying to optimize the filter tune for my 22" build to get a better performance.
I got to a point where i had huge performance improvement, but i still observe that, depending on the flight, the Gyro filter behavior of “actuators control FTT” and “angular velocity FFT” graphs are shightly different even doing the exact same flight (GPS waypoints) with the exactly same conditions and setup.
It seems like the “filter tune” is setted in different way every time drone boots…
Does anyone know something about this strange behavior and how to avoid it?
As adittional info, i can tell i also observed extrange behavior while setting the filters. sometimes they seem not to have been applied, and had to set them again to take effect. sometimes a few times. I also observed this when restoring parameters from backup config file in qground (Sometimes i have to restore 3 or 4 times for all the parameters to be correctly applied), but i gess this would be an other discussion…
Below, i attach the different graphs and logs with the exact same flight, config, setup and conditions, but different results and behavior in flight:
Flight 1: https://review.px4.io/plot_app?log=5203322e-d85e-437d-89f2-4028e4eab2a9
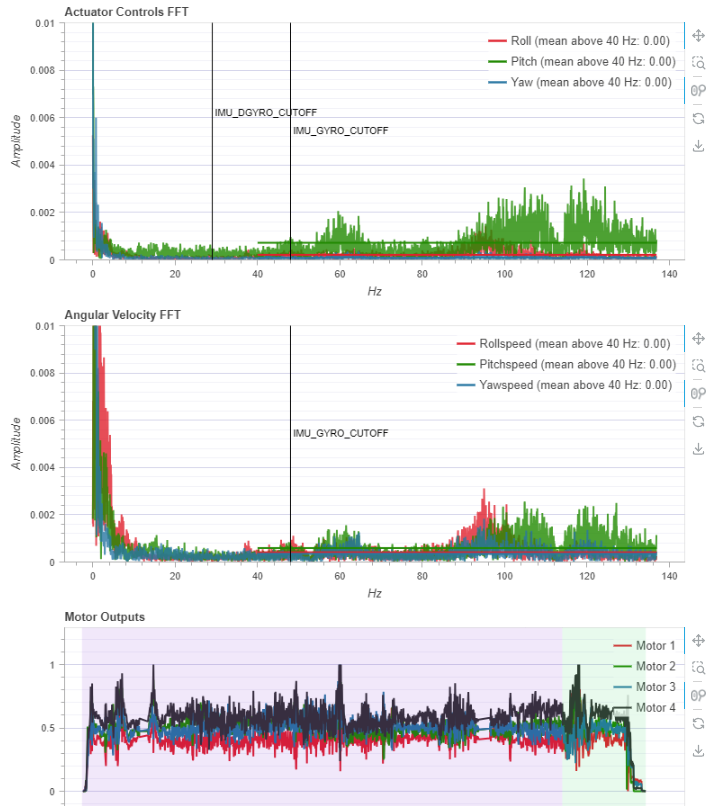
![Captura de pantalla 2024-07-17 093757|687x299])
Flight 2: https://review.px4.io/plot_app?log=4e3a8307-46ff-41c2-8cca-be9d4893a649


Obviously, we observe a much cleaner signal in mission 2, resulting in a much better behavior in motor outputs and an overall better performance in flight. So we want to chase that “filter tune” in all flights.
I hope someone can help me to understand this extrange behavior. Thanks to this awesome community!