Hello, I want to tune the attitude PID as Multicopter PID Tuning Guide
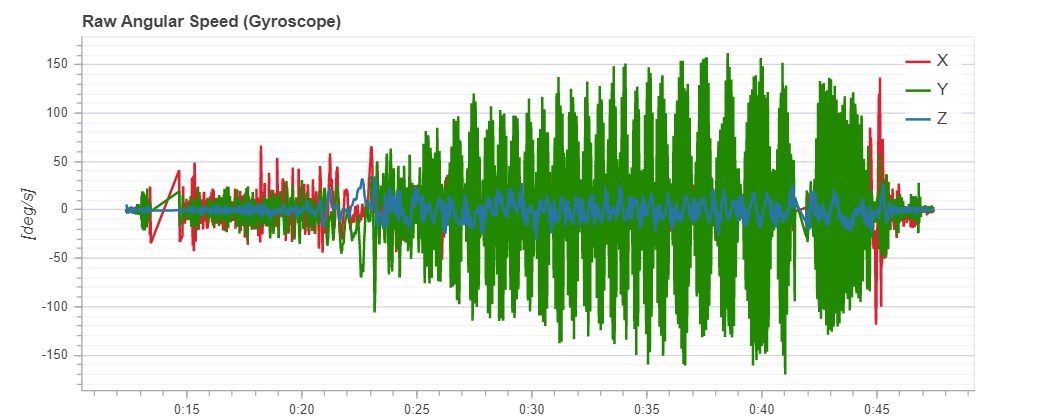
However, in my flight review, the angular rate is raw. This is terrible. I cannot tune angular rate PID by using the raw angular rate. How to deal with it?
Hi @robin-shaun ,
It looks that your drone is vibrating a lot. The plots show filtered value but the noise is huge. This could be caused by unbalanced propellers.
Which vehicle do you have? Is it really a F450?
Yes, it’s F450. But I don’t think the vibration is huge. I have flied many F450s, and most of them fly well, but their angular rates in the Flight Review are all like this…
Here is a log of a F450 with a reasonable amount of vibrations: https://logs.px4.io/plot_app?log=4621e90d-6903-46e2-8def-ba8f8d3f06c0
I’m pretty sure there is something loose or unabalanced on your drone. It could also be that you overturned the rate loops.
To answer your first question: the gyro plots in FlightReview are displaying the filtered values (after passing through the 30Hz low-pass filter), not the raw values.
Hello, it is certain that the vibration in my drone is larger than yours. But if the gyro plots shows the data after lpf, I think observation with such a large noise will make the drone unstable. However, it flies well.
To prove my opinion, I use MATLAB to process the data by a 30hz low pass filter. The result shows as follows.
figure 1. data before passing lpf
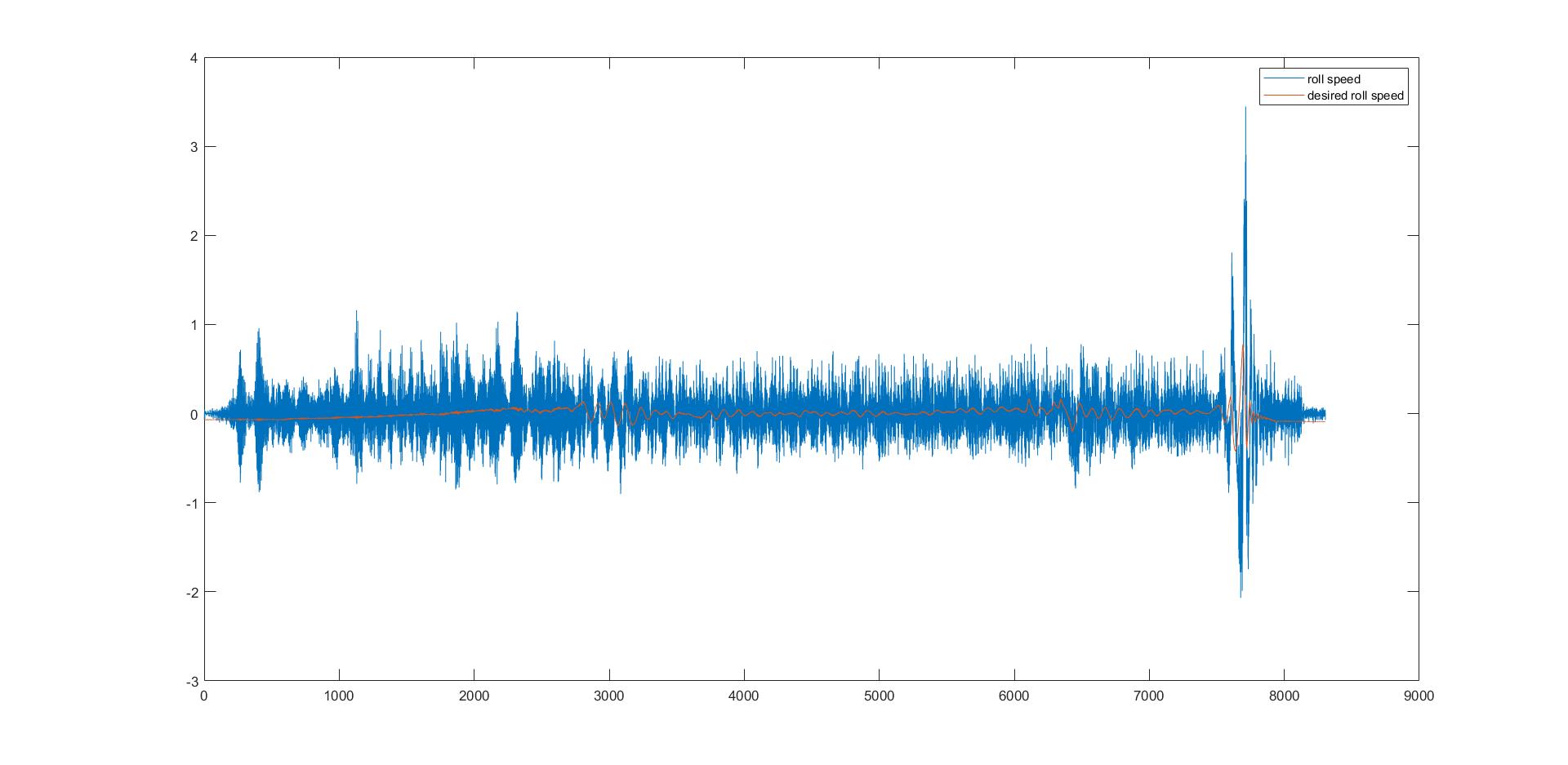
figure 2. data after passing lpf

Therefore, I think the data show in Flight Review have not past a lpf.
Hi @robin-shaun,
-
FlightReview shows the vehicle_angular_velocity topic (flight_review/configured_plots.py at 4a2c27821bb1455bd3d7de514ec4da79d7760c03 · PX4/flight_review · GitHub).
-
vehicle_angular_velocity is published here and the data is a calibrated version of
sensor_control -
sensor_controlcomes from PX4Gyroscope.cpp and contains the filtered gyro values
Conclusion, FlightReview shows the filtered gyro data.
Filtering the data again reduces the noise, yes, because you apply more filtering.
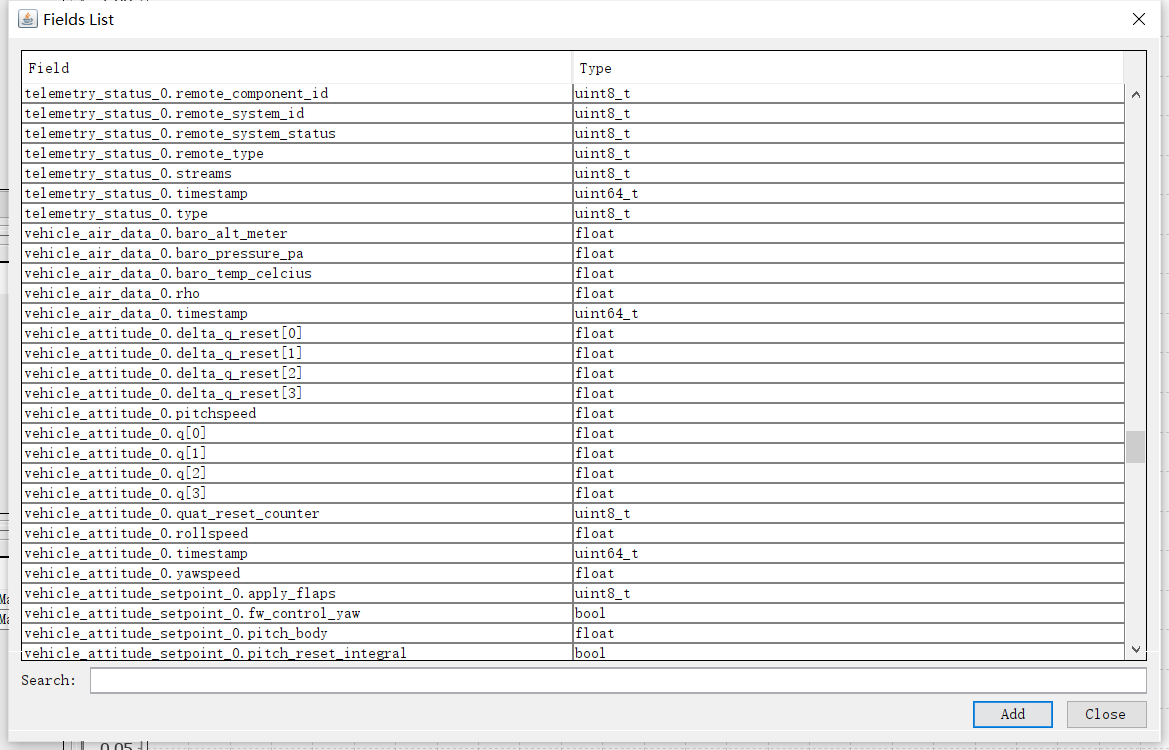
If you are interested of seeing the raw gyro values, you have to look for sensor_combined/gyro_rad.
Here is an example of data showing the difference between the raw data (sensor_combined) and the data going to the controller (vehicle_angular_velocity):

Your drone can fly because you don’t need crazy gains to make a quad fly and the bandwidth of the controller can then be really low and not affected by the noise.
I hope this helped to clarify.
Ok, maybe we can draw a conclusion. In my log, there are no vehicle_angular_velocity topic, and I think Flight Review shows vehicle_attitude instead. For angular rate, this topic is the same as sensor_combined, which means no lpf.
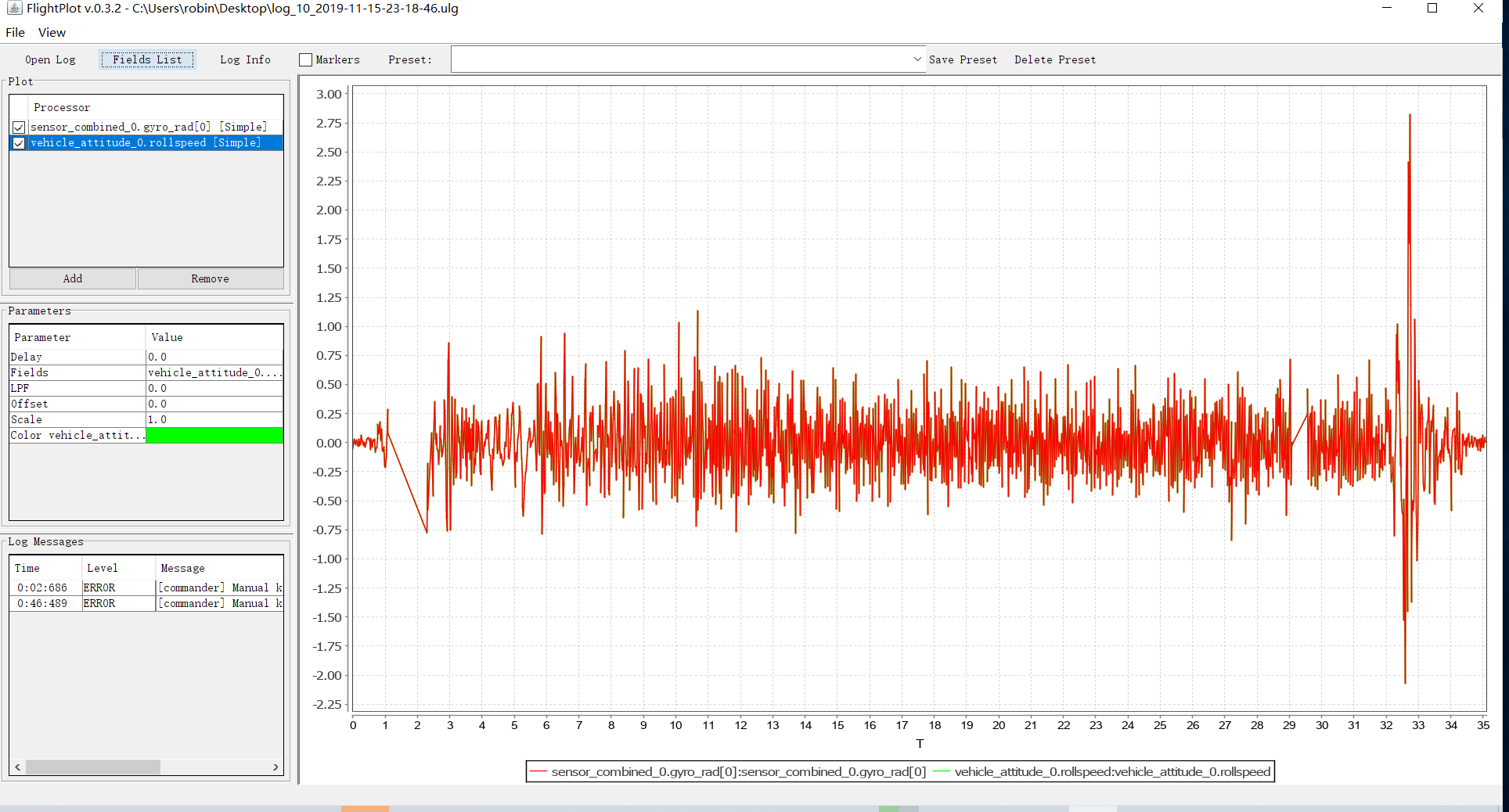
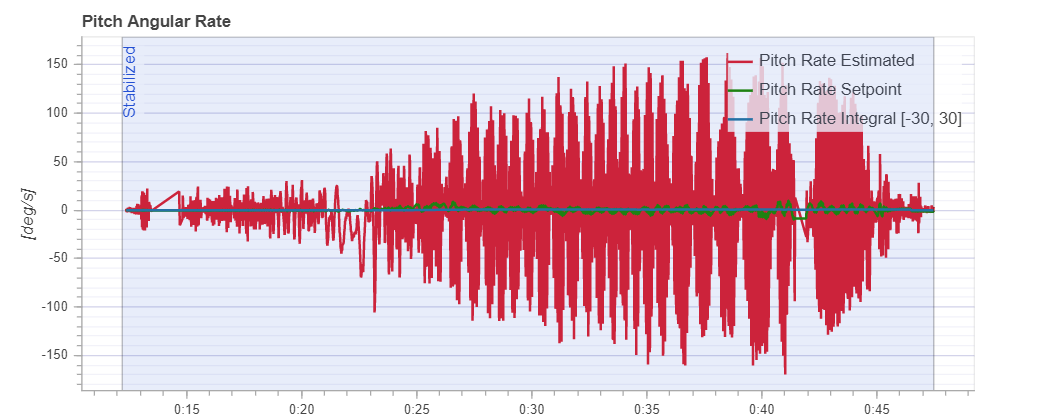
When I presented this question the first time, I showed two graphs, if looking carefully, you will find that pitch rates estimated is the same as raw y angular speed (gyroscope). Now I show this two graphs again.
I’m sorry to forget to present my flight log , here is it.
So this question changes into, how to log vehicle_angular_velocity topic.
Thank you:smiley:
Oh I find that there isn’t vehicle_angular_velocity before 1.10, I will change to 1.10:smiley:
Hi @bresch!
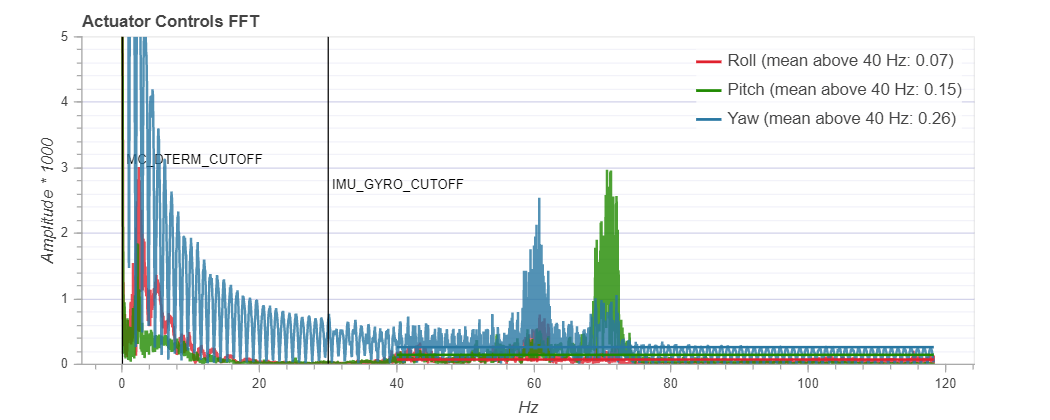
Could you please point me to where I can adjust the cutoff frequency of the lowpass filter? I think I want to play around with it! Thanks!
@spin Please check here: MC Filter Tuning & Control Latency | PX4 Guide (main)
Thank you for the reference, @bresch!