Hello all,
I have been struggling to get the Standard VTOL HITL work properly on fresh Ubuntu 20.04.
-
When the simulation starts, the aircraft exists at the gazebo window
-
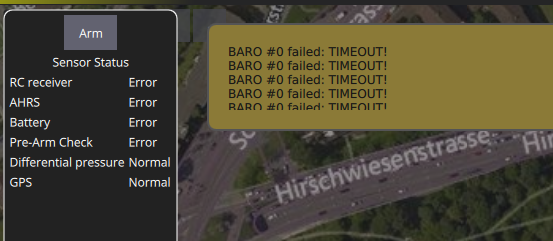
At Qgroundcontrol, I am having some errors
-
I can ARM and FLY manually in STABILIZED mode by using the virtual joysticks
-
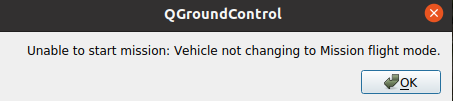
The Mission mode cannot be engaged
Anybody has any idea how to solve this issue?
SOME BACKGROUND INFORMATION
I applied the toolchain installation as per described here.
I follow the HIL instructions as below:
![]() COMMAND-1:
COMMAND-1:
ozan@Ozan-Ubuntu:~/Desktop/PX4_HITL/PX4-Autopilot$ DONT_RUN=1 make px4_sitl_default gazebo
-- PX4 version: v1.11.0-rc3-2110-ge9370c658a
-- PX4 config file: /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/boards/px4/sitl/default.cmake
-- PX4 config: px4_sitl_default
-- PX4 platform: posix
-- PX4 lockstep: enabled
-- cmake build type: RelWithDebInfo
-- The CXX compiler identification is GNU 9.3.0
-- The C compiler identification is GNU 9.3.0
-- The ASM compiler identification is GNU
-- Found assembler: /usr/bin/cc
-- Check for working CXX compiler: /usr/bin/c++
-- Check for working CXX compiler: /usr/bin/c++ -- works
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Detecting CXX compile features
-- Detecting CXX compile features - done
-- Check for working C compiler: /usr/bin/cc
-- Check for working C compiler: /usr/bin/cc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Detecting C compile features
-- Detecting C compile features - done
-- Building for code coverage
-- ccache enabled (export CCACHE_DISABLE=1 to disable)
-- Found PythonInterp: /usr/bin/python3 (found suitable version "3.8.5", minimum required is "3")
-- build type is RelWithDebInfo
-- PX4 ECL: Very lightweight Estimation & Control Library v1.9.0-rc1-548-g6f2dec7
-- ROMFS: ROMFS/px4fmu_common
-- Configuring done
-- Generating done
-- Build files have been written to: /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/build/px4_sitl_default
[0/818] git submodule src/drivers/gps/devices
[1/818] git submodule src/lib/ecl
[5/818] git submodule mavlink/include/mavlink/v2.0
[14/818] git submodule Tools/sitl_gazebo
[21/818] Performing configure step for 'sitl_gazebo'
-- install-prefix: /usr/local
-- cmake build type: RelWithDebInfo
-- The C compiler identification is GNU 9.3.0
-- The CXX compiler identification is GNU 9.3.0
-- Check for working C compiler: /usr/bin/cc
-- Check for working C compiler: /usr/bin/cc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Detecting C compile features
-- Detecting C compile features - done
-- Check for working CXX compiler: /usr/bin/c++
-- Check for working CXX compiler: /usr/bin/c++ -- works
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Detecting CXX compile features
-- Detecting CXX compile features - done
-- Performing Test COMPILER_SUPPORTS_CXX17
-- Performing Test COMPILER_SUPPORTS_CXX17 - Success
-- Performing Test COMPILER_SUPPORTS_CXX14
-- Performing Test COMPILER_SUPPORTS_CXX14 - Success
-- Performing Test COMPILER_SUPPORTS_CXX11
-- Performing Test COMPILER_SUPPORTS_CXX11 - Success
-- Performing Test COMPILER_SUPPORTS_CXX0X
-- Performing Test COMPILER_SUPPORTS_CXX0X - Success
-- Using C++17 standard
-- ccache enabled (export CCACHE_DISABLE=1 to disable)
-- Found Boost: /usr/lib/x86_64-linux-gnu/cmake/Boost-1.71.0/BoostConfig.cmake (found suitable version "1.71.0", minimum required is "1.58") found components: system thread filesystem
-- Found PkgConfig: /usr/bin/pkg-config (found version "0.29.1")
-- Checking for module 'bullet>=2.82'
-- Found bullet, version 2.88
-- Found ccd: /usr/include (found suitable version "2.0", minimum required is "2.0")
-- Found fcl: /usr/include (found suitable version "0.5.0", minimum required is "0.3.2")
-- Found assimp: /usr/include (found version "5.0.0")
-- Found DART: /usr/include (Required is at least version "6.6") found components: dart
-- Found Boost: /usr/lib/x86_64-linux-gnu/cmake/Boost-1.71.0/BoostConfig.cmake (found suitable version "1.71.0", minimum required is "1.40.0") found components: thread system filesystem program_options regex iostreams date_time
-- Found Protobuf: /usr/lib/x86_64-linux-gnu/libprotobuf.so;-lpthread (found version "3.6.1")
-- Looking for ignition-math6 -- found version 6.7.0
-- Searching for dependencies of ignition-math6
-- Looking for OGRE...
-- OGRE_PREFIX_WATCH changed.
-- Checking for module 'OGRE'
-- Found OGRE, version 1.9.0
-- Found Ogre Ghadamon (1.9.0)
-- Found OGRE: optimized;/usr/lib/x86_64-linux-gnu/libOgreMain.so;debug;/usr/lib/x86_64-linux-gnu/libOgreMain.so
-- Looking for OGRE_Paging...
-- Found OGRE_Paging: optimized;/usr/lib/x86_64-linux-gnu/libOgrePaging.so;debug;/usr/lib/x86_64-linux-gnu/libOgrePaging.so
-- Looking for OGRE_Terrain...
-- Found OGRE_Terrain: optimized;/usr/lib/x86_64-linux-gnu/libOgreTerrain.so;debug;/usr/lib/x86_64-linux-gnu/libOgreTerrain.so
-- Looking for OGRE_Property...
-- Found OGRE_Property: optimized;/usr/lib/x86_64-linux-gnu/libOgreProperty.so;debug;/usr/lib/x86_64-linux-gnu/libOgreProperty.so
-- Looking for OGRE_RTShaderSystem...
-- Found OGRE_RTShaderSystem: optimized;/usr/lib/x86_64-linux-gnu/libOgreRTShaderSystem.so;debug;/usr/lib/x86_64-linux-gnu/libOgreRTShaderSystem.so
-- Looking for OGRE_Volume...
-- Found OGRE_Volume: optimized;/usr/lib/x86_64-linux-gnu/libOgreVolume.so;debug;/usr/lib/x86_64-linux-gnu/libOgreVolume.so
-- Looking for OGRE_Overlay...
-- Found OGRE_Overlay: optimized;/usr/lib/x86_64-linux-gnu/libOgreOverlay.so;debug;/usr/lib/x86_64-linux-gnu/libOgreOverlay.so
-- Looking for ignition-math6 -- found version 6.7.0
-- Looking for ignition-transport8 -- found version 8.2.0
-- Searching for dependencies of ignition-transport8
-- Found Protobuf: /usr/lib/x86_64-linux-gnu/libprotobuf.so;-lpthread (found suitable version "3.6.1", minimum required is "3")
-- Config-file not installed for ZeroMQ -- checking for pkg-config
-- Checking for module 'libzmq >= 4'
-- Found libzmq , version 4.3.2
-- Found ZeroMQ: TRUE (Required is at least version "4")
-- Checking for module 'uuid'
-- Found uuid, version 2.34.0
-- Found UUID: TRUE
-- Looking for ignition-msgs5 -- found version 5.7.0
-- Searching for dependencies of ignition-msgs5
-- Looking for ignition-math6 -- found version 6.7.0
-- Checking for module 'tinyxml2'
-- Found tinyxml2, version 6.2.0
-- Looking for ignition-msgs5 -- found version 5.7.0
-- Looking for ignition-common3 -- found version 3.11.1
-- Searching for dependencies of ignition-common3
-- Looking for dlfcn.h - found
-- Looking for libdl - found
-- Found DL: TRUE
-- Searching for <ignition-common3> component [graphics]
-- Looking for ignition-common3-graphics -- found version 3.11.1
-- Searching for dependencies of ignition-common3-graphics
-- Looking for ignition-math6 -- found version 6.7.0
-- Looking for ignition-fuel_tools4 -- found version 4.3.0
-- Searching for dependencies of ignition-fuel_tools4
-- Found CURL: /usr/lib/x86_64-linux-gnu/libcurl.so (found version "7.68.0")
-- Checking for module 'jsoncpp'
-- Found jsoncpp, version 1.7.4
-- Found JSONCPP: TRUE
-- Checking for module 'yaml-0.1'
-- Found yaml-0.1, version 0.2.2
-- Found YAML: TRUE
-- Checking for module 'libzip'
-- Found libzip, version 1.5.1
-- Found ZIP: TRUE
-- Looking for ignition-common3 -- found version 3.11.1
-- Looking for ignition-msgs5 -- found version 5.7.0
-- Checking for one of the modules 'glib-2.0'
-- Found PythonInterp: /usr/bin/python3 (found suitable version "3.8.5", minimum required is "3")
-- Found OpenCV: /usr (found version "4.2.0")
-- Found TinyXML: /usr/lib/x86_64-linux-gnu/libtinyxml.so
-- Checking for module 'gstreamer-1.0 >= 1.0'
-- Found gstreamer-1.0 , version 1.16.2
-- Checking for module 'gstreamer-base-1.0 >= 1.0'
-- Found gstreamer-base-1.0 , version 1.16.2
-- Found GStreamer: GSTREAMER_INCLUDE_DIRS;GSTREAMER_LIBRARIES;GSTREAMER_VERSION;GSTREAMER_BASE_INCLUDE_DIRS;GSTREAMER_BASE_LIBRARIES (Required is at least version "1.0")
-- Checking for module 'OGRE'
-- Found OGRE, version 1.9.0
-- Building klt_feature_tracker without catkin
-- Building OpticalFlow with OpenCV
-- Found MAVLink: /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/mavlink/include (found version "2.0")
-- catkin DISABLED
-- Found Protobuf: /usr/lib/x86_64-linux-gnu/libprotobuf.so;-lpthread (found version "3.6.1")
-- Checking for module 'protobuf'
-- Found protobuf, version 3.6.1
-- Gazebo version: 11.3
-- Found GStreamer: adding gst_camera_plugin
-- Found GStreamer: adding gst_video_stream_widget
-- Configuring done
-- Generating done
-- Build files have been written to: /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/build/px4_sitl_default/build_gazebo
[252/818] Performing build step for 'sitl_gazebo'
[29/125] Generating /home/ozan/Desktop...ebo/models/3DR_gps_mag/3DR_gps_mag.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/3DR_gps_mag/3DR_gps_mag.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/3DR_gps_mag/3DR_gps_mag.sdf
[31/125] Generating /home/ozan/Desktop...Tools/sitl_gazebo/models/boat/boat.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/boat/boat.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/boat/boat.sdf
[33/125] Generating /home/ozan/Desktop...Tools/sitl_gazebo/models/c920/c920.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/c920/c920.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/c920/c920.sdf
[34/125] Generating /home/ozan/Desktop...o/models/depth_camera/depth_camera.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/depth_camera/depth_camera.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/depth_camera/depth_camera.sdf
[35/125] Generating /home/ozan/Desktop..._gazebo/models/cloudship/cloudship.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/cloudship/cloudship.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/cloudship/cloudship.sdf
[36/125] Generating /home/ozan/Desktop...Tools/sitl_gazebo/models/iris/iris.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/iris/iris.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/iris/iris.sdf
[37/125] Generating /home/ozan/Desktop...ebo/models/matrice_100/matrice_100.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/matrice_100/matrice_100.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/matrice_100/matrice_100.sdf
[38/125] Generating /home/ozan/Desktop...models/mb1240-xl-ez4/mb1240-xl-ez4.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/mb1240-xl-ez4/mb1240-xl-ez4.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/mb1240-xl-ez4/mb1240-xl-ez4.sdf
[39/125] Generating /home/ozan/Desktop...sitl_gazebo/models/pixhawk/pixhawk.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/pixhawk/pixhawk.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/pixhawk/pixhawk.sdf
[40/125] Generating /home/ozan/Desktop...ols/sitl_gazebo/models/plane/plane.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/plane/plane.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/plane/plane.sdf
[41/125] Generating /home/ozan/Desktop...sitl_gazebo/models/px4flow/px4flow.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/px4flow/px4flow.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/px4flow/px4flow.sdf
[42/125] Generating /home/ozan/Desktop...tl_gazebo/models/r1_rover/r1_rover.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/r1_rover/r1_rover.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/r1_rover/r1_rover.sdf
[43/125] Generating /home/ozan/Desktop...Tools/sitl_gazebo/models/r200/r200.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/r200/r200.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/r200/r200.sdf
[44/125] Generating /home/ozan/Desktop...ols/sitl_gazebo/models/rover/rover.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/rover/rover.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/rover/rover.sdf
[45/125] Generating /home/ozan/Desktop...ols/sitl_gazebo/models/sf10a/sf10a.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/sf10a/sf10a.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/sf10a/sf10a.sdf
[46/125] Generating /home/ozan/Desktop...models/standard_vtol/standard_vtol.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/standard_vtol/standard_vtol.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/standard_vtol/standard_vtol.sdf
[47/125] Generating /home/ozan/Desktop...ndard_vtol_drop/standard_vtol_drop.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/standard_vtol_drop/standard_vtol_drop.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/standard_vtol_drop/standard_vtol_drop.sdf
[48/125] Generating /home/ozan/Desktop..._gazebo/models/tiltrotor/tiltrotor.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/tiltrotor/tiltrotor.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/tiltrotor/tiltrotor.sdf
[50/125] Generating /home/ozan/Desktop...o/models/typhoon_h480/typhoon_h480.sdf
/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/typhoon_h480/typhoon_h480.sdf.jinja -> /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models/typhoon_h480/typhoon_h480.sdf
[101/125] Building CXX object CMakeFil.../gazebo_gimbal_controller_plugin.cpp.o
In file included from /usr/include/string.h:495,
from /usr/include/tinyxml.h:42,
from /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/include/common.h:26,
from /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/src/gazebo_gimbal_controller_plugin.cpp:18:
In function ‘void* memcpy(void*, const void*, size_t)’,
inlined from ‘void mav_array_memcpy(void*, const void*, size_t)’ at /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/mavlink/include/mavlink/v2.0/common/../protocol.h:176:9,
inlined from ‘uint16_t mavlink_msg_gimbal_device_information_pack_chan(uint8_t, uint8_t, uint8_t, mavlink_message_t*, uint32_t, const char*, const char*, const char*, uint32_t, uint32_t, uint64_t, uint16_t, uint16_t, float, float, float, float, float, float)’ at /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/mavlink/include/mavlink/v2.0/common/./mavlink_msg_gimbal_device_information.h:209:21,
inlined from ‘void gazebo::GimbalControllerPlugin::SendGimbalDeviceInformation()’ at /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/src/gazebo_gimbal_controller_plugin.cpp:651:50:
/usr/include/x86_64-linux-gnu/bits/string_fortified.h:34:33: warning: ‘void* __builtin_memcpy(void*, const void*, long unsigned int)’ reading 32 bytes from a region of size 4 [-Wstringop-overflow=]
34 | return __builtin___memcpy_chk (__dest, __src, __len, __bos0 (__dest));
| ~~~~~~~~~~~~~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
In function ‘void* memcpy(void*, const void*, size_t)’,
inlined from ‘void mav_array_memcpy(void*, const void*, size_t)’ at /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/mavlink/include/mavlink/v2.0/common/../protocol.h:176:9,
inlined from ‘uint16_t mavlink_msg_gimbal_device_information_pack_chan(uint8_t, uint8_t, uint8_t, mavlink_message_t*, uint32_t, const char*, const char*, const char*, uint32_t, uint32_t, uint64_t, uint16_t, uint16_t, float, float, float, float, float, float)’ at /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/mavlink/include/mavlink/v2.0/common/./mavlink_msg_gimbal_device_information.h:210:21,
inlined from ‘void gazebo::GimbalControllerPlugin::SendGimbalDeviceInformation()’ at /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/src/gazebo_gimbal_controller_plugin.cpp:651:50:
/usr/include/x86_64-linux-gnu/bits/string_fortified.h:34:33: warning: ‘void* __builtin_memcpy(void*, const void*, long unsigned int)’ reading 32 bytes from a region of size 12 [-Wstringop-overflow=]
34 | return __builtin___memcpy_chk (__dest, __src, __len, __bos0 (__dest));
| ~~~~~~~~~~~~~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
In function ‘void* memcpy(void*, const void*, size_t)’,
inlined from ‘void mav_array_memcpy(void*, const void*, size_t)’ at /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/mavlink/include/mavlink/v2.0/common/../protocol.h:176:9,
inlined from ‘uint16_t mavlink_msg_gimbal_device_information_pack_chan(uint8_t, uint8_t, uint8_t, mavlink_message_t*, uint32_t, const char*, const char*, const char*, uint32_t, uint32_t, uint64_t, uint16_t, uint16_t, float, float, float, float, float, float)’ at /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/mavlink/include/mavlink/v2.0/common/./mavlink_msg_gimbal_device_information.h:211:21,
inlined from ‘void gazebo::GimbalControllerPlugin::SendGimbalDeviceInformation()’ at /home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/src/gazebo_gimbal_controller_plugin.cpp:651:50:
/usr/include/x86_64-linux-gnu/bits/string_fortified.h:34:33: warning: ‘void* __builtin_memcpy(void*, const void*, long unsigned int)’ reading 32 bytes from a region of size 1 [-Wstringop-overflow=]
34 | return __builtin___memcpy_chk (__dest, __src, __len, __bos0 (__dest));
| ~~~~~~~~~~~~~~~~~~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
[117/125] Building CXX object CMakeFiles/gazebo_user_camera_plugin.dir/include/[125/125] Linking CXX shared library libgazebo_opticalflow_plugin.so
[817/818] cd /home/ozan/Desktop/PX4_HI...L/PX4-Autopilot/build/px4_sitl_default
Not running simulation (DONT_RUN is set).
![]() COMMAND-2:
COMMAND-2:
ozan@Ozan-Ubuntu:~/Desktop/PX4_HITL/PX4-Autopilot$ source Tools/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
GAZEBO_PLUGIN_PATH :/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/build/px4_sitl_default/build_gazebo
GAZEBO_MODEL_PATH :/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/Tools/sitl_gazebo/models
LD_LIBRARY_PATH :/home/ozan/Desktop/PX4_HITL/PX4-Autopilot/build/px4_sitl_default/build_gazebo
![]() COMMAND-3:
COMMAND-3:
ozan@Ozan-Ubuntu:~/Desktop/PX4_HITL/PX4-Autopilot$ gazebo Tools/sitl_gazebo/worlds/hitl_standard_vtol.world
Opened serial device /dev/ttyACM0
My standard_vtol_hitl.sdf file settings are as below:
<plugin name='mavlink_interface' filename='libgazebo_mavlink_interface.so'>
<robotNamespace/>
<imuSubTopic>/imu</imuSubTopic>
<magSubTopic>/mag</magSubTopic>
<gpsSubTopic>/gps0</gpsSubTopic>
<baroSubTopic>/baro</baroSubTopic>
<mavlink_addr>INADDR_ANY</mavlink_addr>
<mavlink_udp_port>14560</mavlink_udp_port>
<mavlink_tcp_port>4560</mavlink_tcp_port>
<serialEnabled>1</serialEnabled>
<serialDevice>/dev/ttyACM0</serialDevice>
<baudRate>921600</baudRate>
<qgc_addr>INADDR_ANY</qgc_addr>
<qgc_udp_port>14550</qgc_udp_port>
<sdk_addr>INADDR_ANY</sdk_addr>
<sdk_udp_port>14540</sdk_udp_port>
<hil_mode>1</hil_mode>
<hil_state_level>0</hil_state_level>
<send_vision_estimation>0</send_vision_estimation>
<send_odometry>1</send_odometry>
<enable_lockstep>0</enable_lockstep>
<use_tcp>1</use_tcp>