Hi guys,
I’m trying to control a drone in gazebo via mavros. I try to run a test node which set the mode to offboard, arm the drone and draw a square. When I run the node the drone takeoff and hold just a while then land. I cant set mode to offboard mode. Px4 and QGC show this warning ’
WARN [mavlink] SET_POSITION_TARGET_LOCAL_NED coordinate frame 0 unsupported’
. I couldn’t find what the problem exactly is.
I use ros melodic, gazebo9,vmware ubuntu 18.04.
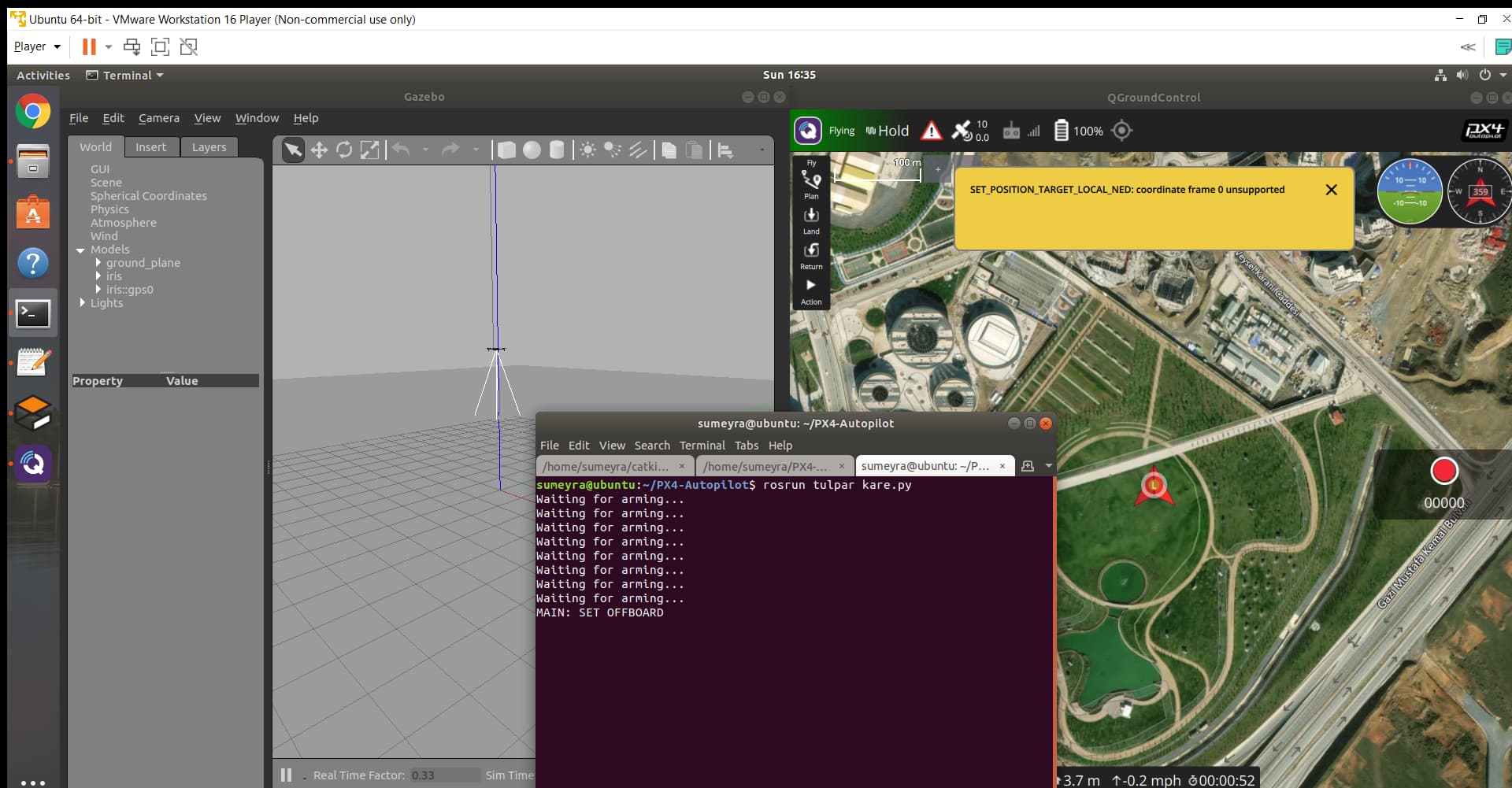
THIRD TERMINAL IS THAT
sumeyra@ubuntu:~/PX4-Autopilot$ rosrun tulpar kare.py
Waiting for arming…
Waiting for arming…
Waiting for arming…
Waiting for arming…
Waiting for arming…
Waiting for arming…
Waiting for arming…
Waiting for arming…
MAIN: SET OFFBOARD
(It just print ‘set offboard’ because of that I wrote this message on my code) But while running my code I did ’
rostopic echo /mavros/state
’ which results in
sumeyra@ubuntu:~/PX4-Autopilot$ rostopic echo /mavros/state
header:
seq: 44
stamp:
secs: 1648394216
nsecs: 419879279
frame_id: ‘’
connected: True
armed: False
guided: True
manual_input: False
mode: “AUTO.LOITER”
system_status: 3
header:
seq: 54
stamp:
secs: 1648394230
nsecs: 332277808
frame_id: ‘’
connected: True
armed: True
guided: True
manual_input: False
mode: “AUTO.TAKEOFF”
system_status: 4
header:
seq: 62
stamp:
secs: 1648394246
nsecs: 270976013
frame_id: ‘’
connected: True
armed: True
guided: True
manual_input: False
mode: “AUTO.LOITER”
system_status: 4
header:
seq: 79
stamp:
secs: 1648394276
nsecs: 674984034
frame_id: ‘’
connected: True
armed: True
guided: True
manual_input: False
mode: “AUTO.RTL”
system_status: 4
Could you help me to solve this problem guys?
FIRST TERMINAL IS THAT
sumeyra@ubuntu:~$ roslaunch mavros px4.launch fcu_url:=“udp://:14540@192.168.1.36:14557”
… logging to /home/sumeyra/.ros/log/c22b2070-ade0-11ec-b15a-000c2971bdc0/roslaunch-ubuntu-25341.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
WARNING: disk usage in log directory [/home/sumeyra/.ros/log] is over 1GB.
It’s recommended that you use the ‘rosclean’ command.started roslaunch server http://127.0.0.1:39321/
SUMMARY
CLEAR PARAMETERS
- /mavros/
PARAMETERS
- /mavros/camera/frame_id: base_link
- /mavros/cmd/use_comp_id_system_control: False
- /mavros/conn/heartbeat_rate: 1.0
- /mavros/conn/system_time_rate: 1.0
- /mavros/conn/timeout: 10.0
- /mavros/conn/timesync_rate: 10.0
- /mavros/distance_sensor/hrlv_ez4_pub/field_of_view: 0.0
- /mavros/distance_sensor/hrlv_ez4_pub/frame_id: hrlv_ez4_sonar
- /mavros/distance_sensor/hrlv_ez4_pub/id: 0
- /mavros/distance_sensor/hrlv_ez4_pub/orientation: PITCH_270
- /mavros/distance_sensor/hrlv_ez4_pub/send_tf: True
- /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/x: 0.0
- /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/y: 0.0
- /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/z: -0.1
- /mavros/distance_sensor/laser_1_sub/id: 3
- /mavros/distance_sensor/laser_1_sub/orientation: PITCH_270
- /mavros/distance_sensor/laser_1_sub/subscriber: True
- /mavros/distance_sensor/lidarlite_pub/field_of_view: 0.0
- /mavros/distance_sensor/lidarlite_pub/frame_id: lidarlite_laser
- /mavros/distance_sensor/lidarlite_pub/id: 1
- /mavros/distance_sensor/lidarlite_pub/orientation: PITCH_270
- /mavros/distance_sensor/lidarlite_pub/send_tf: True
- /mavros/distance_sensor/lidarlite_pub/sensor_position/x: 0.0
- /mavros/distance_sensor/lidarlite_pub/sensor_position/y: 0.0
- /mavros/distance_sensor/lidarlite_pub/sensor_position/z: -0.1
- /mavros/distance_sensor/sonar_1_sub/horizontal_fov_ratio: 1.0
- /mavros/distance_sensor/sonar_1_sub/id: 2
- /mavros/distance_sensor/sonar_1_sub/orientation: PITCH_270
- /mavros/distance_sensor/sonar_1_sub/subscriber: True
- /mavros/distance_sensor/sonar_1_sub/vertical_fov_ratio: 1.0
- /mavros/fake_gps/eph: 2.0
- /mavros/fake_gps/epv: 2.0
- /mavros/fake_gps/fix_type: 3
- /mavros/fake_gps/geo_origin/alt: 408.0
- /mavros/fake_gps/geo_origin/lat: 47.3667
- /mavros/fake_gps/geo_origin/lon: 8.55
- /mavros/fake_gps/gps_rate: 5.0
- /mavros/fake_gps/mocap_transform: True
- /mavros/fake_gps/satellites_visible: 5
- /mavros/fake_gps/tf/child_frame_id: fix
- /mavros/fake_gps/tf/frame_id: map
- /mavros/fake_gps/tf/listen: False
- /mavros/fake_gps/tf/rate_limit: 10.0
- /mavros/fake_gps/tf/send: False
- /mavros/fake_gps/use_mocap: True
- /mavros/fake_gps/use_vision: False
- /mavros/fcu_protocol: v2.0
- /mavros/fcu_url: udp://:14540@192…
- /mavros/gcs_url:
- /mavros/global_position/child_frame_id: base_link
- /mavros/global_position/frame_id: map
- /mavros/global_position/gps_uere: 1.0
- /mavros/global_position/rot_covariance: 99999.0
- /mavros/global_position/tf/child_frame_id: base_link
- /mavros/global_position/tf/frame_id: map
- /mavros/global_position/tf/global_frame_id: earth
- /mavros/global_position/tf/send: False
- /mavros/global_position/use_relative_alt: True
- /mavros/image/frame_id: px4flow
- /mavros/imu/angular_velocity_stdev: 0.0003490659 // 0…
- /mavros/imu/frame_id: base_link
- /mavros/imu/linear_acceleration_stdev: 0.0003
- /mavros/imu/magnetic_stdev: 0.0
- /mavros/imu/orientation_stdev: 1.0
- /mavros/landing_target/camera/fov_x: 2.0071286398
- /mavros/landing_target/camera/fov_y: 2.0071286398
- /mavros/landing_target/image/height: 480
- /mavros/landing_target/image/width: 640
- /mavros/landing_target/land_target_type: VISION_FIDUCIAL
- /mavros/landing_target/listen_lt: False
- /mavros/landing_target/mav_frame: LOCAL_NED
- /mavros/landing_target/target_size/x: 0.3
- /mavros/landing_target/target_size/y: 0.3
- /mavros/landing_target/tf/child_frame_id: camera_center
- /mavros/landing_target/tf/frame_id: landing_target
- /mavros/landing_target/tf/listen: False
- /mavros/landing_target/tf/rate_limit: 10.0
- /mavros/landing_target/tf/send: True
- /mavros/local_position/frame_id: map
- /mavros/local_position/tf/child_frame_id: base_link
- /mavros/local_position/tf/frame_id: map
- /mavros/local_position/tf/send: False
- /mavros/local_position/tf/send_fcu: False
- /mavros/mission/pull_after_gcs: True
- /mavros/mission/use_mission_item_int: True
- /mavros/mocap/use_pose: True
- /mavros/mocap/use_tf: False
- /mavros/odometry/fcu/odom_child_id_des: base_link
- /mavros/odometry/fcu/odom_parent_id_des: map
- /mavros/plugin_blacklist: [‘safety_area’, '…
- /mavros/plugin_whitelist:
- /mavros/px4flow/frame_id: px4flow
- /mavros/px4flow/ranger_fov: 0.118682
- /mavros/px4flow/ranger_max_range: 5.0
- /mavros/px4flow/ranger_min_range: 0.3
- /mavros/safety_area/p1/x: 1.0
- /mavros/safety_area/p1/y: 1.0
- /mavros/safety_area/p1/z: 1.0
- /mavros/safety_area/p2/x: -1.0
- /mavros/safety_area/p2/y: -1.0
- /mavros/safety_area/p2/z: -1.0
- /mavros/setpoint_accel/send_force: False
- /mavros/setpoint_attitude/reverse_thrust: False
- /mavros/setpoint_attitude/tf/child_frame_id: target_attitude
- /mavros/setpoint_attitude/tf/frame_id: map
- /mavros/setpoint_attitude/tf/listen: False
- /mavros/setpoint_attitude/tf/rate_limit: 50.0
- /mavros/setpoint_attitude/use_quaternion: False
- /mavros/setpoint_position/mav_frame: LOCAL_NED
- /mavros/setpoint_position/tf/child_frame_id: target_position
- /mavros/setpoint_position/tf/frame_id: map
- /mavros/setpoint_position/tf/listen: False
- /mavros/setpoint_position/tf/rate_limit: 50.0
- /mavros/setpoint_raw/thrust_scaling: 1.0
- /mavros/setpoint_velocity/mav_frame: LOCAL_NED
- /mavros/startup_px4_usb_quirk: True
- /mavros/sys/disable_diag: False
- /mavros/sys/min_voltage: 10.0
- /mavros/target_component_id: 1
- /mavros/target_system_id: 1
- /mavros/tdr_radio/low_rssi: 40
- /mavros/time/time_ref_source: fcu
- /mavros/time/timesync_avg_alpha: 0.6
- /mavros/time/timesync_mode: MAVLINK
- /mavros/vibration/frame_id: base_link
- /mavros/vision_pose/tf/child_frame_id: vision_estimate
- /mavros/vision_pose/tf/frame_id: odom
- /mavros/vision_pose/tf/listen: False
- /mavros/vision_pose/tf/rate_limit: 10.0
- /mavros/vision_speed/listen_twist: True
- /mavros/vision_speed/twist_cov: True
- /mavros/wheel_odometry/child_frame_id: base_link
- /mavros/wheel_odometry/count: 2
- /mavros/wheel_odometry/frame_id: odom
- /mavros/wheel_odometry/send_raw: True
- /mavros/wheel_odometry/send_twist: False
- /mavros/wheel_odometry/tf/child_frame_id: base_link
- /mavros/wheel_odometry/tf/frame_id: odom
- /mavros/wheel_odometry/tf/send: False
- /mavros/wheel_odometry/use_rpm: False
- /mavros/wheel_odometry/vel_error: 0.1
- /mavros/wheel_odometry/wheel0/radius: 0.05
- /mavros/wheel_odometry/wheel0/x: 0.0
- /mavros/wheel_odometry/wheel0/y: -0.15
- /mavros/wheel_odometry/wheel1/radius: 0.05
- /mavros/wheel_odometry/wheel1/x: 0.0
- /mavros/wheel_odometry/wheel1/y: 0.15
- /rosdistro: melodic
- /rosversion: 1.14.12
NODES
/
mavros (mavros/mavros_node)auto-starting new master
process[master]: started with pid [25351]
ROS_MASTER_URI=http://127.0.0.1:11311setting /run_id to c22b2070-ade0-11ec-b15a-000c2971bdc0
process[rosout-1]: started with pid [25362]
started core service [/rosout]
process[mavros-2]: started with pid [25370]
[ INFO] [1648394139.232587682]: FCU URL: udp://:14540@192.168.1.36:14557
[ INFO] [1648394139.235225839]: udp0: Bind address: 0.0.0.0:14540
[ INFO] [1648394139.235329186]: udp0: Remote address: 192.168.1.36:14557
[ INFO] [1648394139.235527000]: GCS bridge disabled
[ INFO] [1648394139.246848258]: Plugin 3dr_radio loaded
[ INFO] [1648394139.254404912]: Plugin 3dr_radio initialized
[ INFO] [1648394139.254570251]: Plugin actuator_control loaded
[ INFO] [1648394139.259118351]: Plugin actuator_control initialized
[ INFO] [1648394139.264393505]: Plugin adsb loaded
[ INFO] [1648394139.266643705]: Plugin adsb initialized
[ INFO] [1648394139.266960751]: Plugin altitude loaded
[ INFO] [1648394139.267727923]: Plugin altitude initialized
[ INFO] [1648394139.267920838]: Plugin cam_imu_sync loaded
[ INFO] [1648394139.268477828]: Plugin cam_imu_sync initialized
[ INFO] [1648394139.268632316]: Plugin camera loaded
[ INFO] [1648394139.269283848]: Plugin camera initialized
[ INFO] [1648394139.269498612]: Plugin command loaded
[ INFO] [1648394139.275965604]: Plugin command initialized
[ INFO] [1648394139.276229496]: Plugin companion_process_status loaded
[ INFO] [1648394139.277788286]: Plugin companion_process_status initialized
[ INFO] [1648394139.277903906]: Plugin debug_value loaded
[ INFO] [1648394139.280863824]: Plugin debug_value initialized
[ INFO] [1648394139.280947906]: Plugin distance_sensor blacklisted
[ INFO] [1648394139.281193671]: Plugin esc_status loaded
[ INFO] [1648394139.283300416]: Plugin esc_status initialized
[ INFO] [1648394139.283509665]: Plugin esc_telemetry loaded
[ INFO] [1648394139.284319662]: Plugin esc_telemetry initialized
[ INFO] [1648394139.284532679]: Plugin fake_gps loaded
[ INFO] [1648394139.301454584]: Plugin fake_gps initialized
[ INFO] [1648394139.301747777]: Plugin ftp loaded
[ INFO] [1648394139.308462431]: Plugin ftp initialized
[ INFO] [1648394139.308727817]: Plugin geofence loaded
[ INFO] [1648394139.312085759]: Plugin geofence initialized
[ INFO] [1648394139.312314223]: Plugin global_position loaded
[ INFO] [1648394139.322584475]: Plugin global_position initialized
[ INFO] [1648394139.322765972]: Plugin gps_input loaded
[ INFO] [1648394139.324549018]: Plugin gps_input initialized
[ INFO] [1648394139.324690077]: Plugin gps_rtk loaded
[ INFO] [1648394139.327181676]: Plugin gps_rtk initialized
[ INFO] [1648394139.327345290]: Plugin gps_status loaded
[ INFO] [1648394139.330883382]: Plugin gps_status initialized
[ INFO] [1648394139.331121096]: Plugin hil loaded
[ INFO] [1648394139.344794728]: Plugin hil initialized
[ INFO] [1648394139.345050360]: Plugin home_position loaded
[ INFO] [1648394139.348030746]: Plugin home_position initialized
[ INFO] [1648394139.348283505]: Plugin imu loaded
[ INFO] [1648394139.358329702]: Plugin imu initialized
[ INFO] [1648394139.358734915]: Plugin landing_target loaded
[ INFO] [1648394139.380508672]: Plugin landing_target initialized
[ INFO] [1648394139.380742053]: Plugin local_position loaded
[ INFO] [1648394139.386758771]: Plugin local_position initialized
[ INFO] [1648394139.387181345]: Plugin log_transfer loaded
[ INFO] [1648394139.391972902]: Plugin log_transfer initialized
[ INFO] [1648394139.392167620]: Plugin mag_calibration_status loaded
[ INFO] [1648394139.393518239]: Plugin mag_calibration_status initialized
[ INFO] [1648394139.393758501]: Plugin manual_control loaded
[ INFO] [1648394139.396599394]: Plugin manual_control initialized
[ INFO] [1648394139.396860662]: Plugin mocap_pose_estimate loaded
[ INFO] [1648394139.399344816]: Plugin mocap_pose_estimate initialized
[ INFO] [1648394139.399528014]: Plugin mount_control loaded
[ INFO] [1648394139.402874692]: Plugin mount_control initialized
[ INFO] [1648394139.403018433]: Plugin nav_controller_output loaded
[ INFO] [1648394139.403559035]: Plugin nav_controller_output initialized
[ INFO] [1648394139.403702309]: Plugin obstacle_distance loaded
[ INFO] [1648394139.405665746]: Plugin obstacle_distance initialized
[ INFO] [1648394139.405780376]: Plugin odom loaded
[ INFO] [1648394139.411887950]: Plugin odom initialized
[ INFO] [1648394139.412154162]: Plugin onboard_computer_status loaded
[ INFO] [1648394139.414306949]: Plugin onboard_computer_status initialized
[ INFO] [1648394139.414545172]: Plugin param loaded
[ INFO] [1648394139.419076409]: Plugin param initialized
[ INFO] [1648394139.419249483]: Plugin play_tune loaded
[ INFO] [1648394139.421167116]: Plugin play_tune initialized
[ INFO] [1648394139.421531761]: Plugin px4flow loaded
[ INFO] [1648394139.429196456]: Plugin px4flow initialized
[ INFO] [1648394139.429445227]: Plugin rallypoint loaded
[ INFO] [1648394139.431656134]: Plugin rallypoint initialized
[ INFO] [1648394139.431728709]: Plugin rangefinder blacklisted
[ INFO] [1648394139.432119572]: Plugin rc_io loaded
[ INFO] [1648394139.435312386]: Plugin rc_io initialized
[ INFO] [1648394139.435381354]: Plugin safety_area blacklisted
[ INFO] [1648394139.435539715]: Plugin setpoint_accel loaded
[ INFO] [1648394139.443533459]: Plugin setpoint_accel initialized
[ INFO] [1648394139.445468116]: Plugin setpoint_attitude loaded
[ INFO] [1648394139.458462389]: Plugin setpoint_attitude initialized
[ INFO] [1648394139.458723207]: Plugin setpoint_position loaded
[ INFO] [1648394139.474609162]: Plugin setpoint_position initialized
[ INFO] [1648394139.474963835]: Plugin setpoint_raw loaded
[ INFO] [1648394139.485071722]: Plugin setpoint_raw initialized
[ INFO] [1648394139.485370054]: Plugin setpoint_trajectory loaded
[ INFO] [1648394139.489006116]: Plugin setpoint_trajectory initialized
[ INFO] [1648394139.489233636]: Plugin setpoint_velocity loaded
[ INFO] [1648394139.492827308]: Plugin setpoint_velocity initialized
[ INFO] [1648394139.493114072]: Plugin sys_status loaded
[ INFO] [1648394139.512713001]: Plugin sys_status initialized
[ INFO] [1648394139.513123129]: Plugin sys_time loaded
[ INFO] [1648394139.519145259]: TM: Timesync mode: MAVLINK
[ INFO] [1648394139.519560047]: TM: Not publishing sim time
[ INFO] [1648394139.521063311]: Plugin sys_time initialized
[ INFO] [1648394139.521235715]: Plugin terrain loaded
[ INFO] [1648394139.521820403]: Plugin terrain initialized
[ INFO] [1648394139.521948816]: Plugin trajectory loaded
[ INFO] [1648394139.526694150]: Plugin trajectory initialized
[ INFO] [1648394139.526844028]: Plugin tunnel loaded
[ INFO] [1648394139.529129937]: Plugin tunnel initialized
[ INFO] [1648394139.529281806]: Plugin vfr_hud loaded
[ INFO] [1648394139.530126882]: Plugin vfr_hud initialized
[ INFO] [1648394139.530190707]: Plugin vibration blacklisted
[ INFO] [1648394139.530314371]: Plugin vision_pose_estimate loaded
[ INFO] [1648394139.550814457]: Plugin vision_pose_estimate initialized
[ INFO] [1648394139.551094801]: Plugin vision_speed_estimate loaded
[ INFO] [1648394139.558430137]: Plugin vision_speed_estimate initialized
[ INFO] [1648394139.558957180]: Plugin waypoint loaded
[ INFO] [1648394139.564271625]: Plugin waypoint initialized
[ INFO] [1648394139.564361635]: Plugin wheel_odometry blacklisted
[ INFO] [1648394139.564521473]: Plugin wind_estimation loaded
[ INFO] [1648394139.565273281]: Plugin wind_estimation initialized
[ INFO] [1648394139.565513578]: Autostarting mavlink via USB on PX4
[ INFO] [1648394139.565693695]: Built-in SIMD instructions: SSE, SSE2
[ INFO] [1648394139.565753214]: Built-in MAVLink package version: 2022.2.2
[ INFO] [1648394139.565808187]: Known MAVLink dialects: common ardupilotmega ASLUAV AVSSUAS all development icarous matrixpilot paparazzi standard storm32 uAvionix ualberta
[ INFO] [1648394139.565860074]: MAVROS started. MY ID 1.240, TARGET ID 1.1
[ INFO] [1648394158.166303116]: udp0: Remote address: 127.0.0.1:14580
[ INFO] [1648394158.166598622]: IMU: High resolution IMU detected!
[ WARN] [1648394159.185667872]: CMD: Unexpected command 512, result 0
[ INFO] [1648394159.270860079]: CON: Got HEARTBEAT, connected. FCU: PX4 Autopilot
[ INFO] [1648394159.273375400]: IMU: High resolution IMU detected!
[ INFO] [1648394160.294909880]: GF: Using MISSION_ITEM_INT
[ INFO] [1648394160.295073415]: RP: Using MISSION_ITEM_INT
[ INFO] [1648394160.295103741]: WP: Using MISSION_ITEM_INT
[ INFO] [1648394160.295129916]: VER: 1.1: Capabilities 0x000000000000e4ef
[ INFO] [1648394160.295178878]: VER: 1.1: Flight software: 010d0040 (69560bd4f4000000)
[ INFO] [1648394160.295194589]: VER: 1.1: Middleware software: 010d0040 (69560bd4f4000000)
[ INFO] [1648394160.295204350]: VER: 1.1: OS software: 050400ff (c5c7d2b4f26f52f1)
[ INFO] [1648394160.295217571]: VER: 1.1: Board hardware: 00000001
[ INFO] [1648394160.295227682]: VER: 1.1: VID/PID: 0000:0000
[ INFO] [1648394160.295238150]: VER: 1.1: UID: 4954414c44494e4f
[ INFO] [1648394161.900193506]: IMU: Attitude quaternion IMU detected!
[ INFO] [1648394174.274547509]: GF: mission received
[ INFO] [1648394174.275911919]: RP: mission received
[ INFO] [1648394174.276153425]: WP: mission received
[ERROR] [1648394210.022084477]: TM : Time jump detected. Resetting time synchroniser.
[ WARN] [1648394249.092568617]: CMD: Unexpected command 176, result 0
[ERROR] [1648394261.021610383]: TM : Time jump detected. Resetting time synchroniser.
SECOND TERMINAL IS THAT
sumeyra@ubuntu:~$ cd PX4-Autopilot/
sumeyra@ubuntu:~/PX4-Autopilot$ DONT_RUN=1 make px4_sitl_default gazebo
[0/4] Performing build step for ‘sitl_gazebo’
ninja: no work to do.
[3/4] cd /home/sumeyra/PX4-Autopilot/b…a/PX4-Autopilot/build/px4_sitl_default
Not running simulation (DONT_RUN is set).
sumeyra@ubuntu:~/PX4-Autopilot$ source ~/catkin_ws/devel/setup.bash # (optional)
sumeyra@ubuntu:~/PX4-Autopilot$ source Tools/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
GAZEBO_PLUGIN_PATH :/home/sumeyra/PX4-Autopilot/build/px4_sitl_default/build_gazebo
GAZEBO_MODEL_PATH :/home/sumeyra/PX4-Autopilot/Tools/sitl_gazebo/models
LD_LIBRARY_PATH /home/sumeyra/catkin_ws/devel/lib:/opt/ros/melodic/lib:/home/sumeyra/PX4-Autopilot/build/px4_sitl_default/build_gazebo
sumeyra@ubuntu:~/PX4-Autopilot$ export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)sumeyra@ubuntu:~/PX4-Autopilot$ export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/sitl_gazebo
sumeyra@ubuntu:~/PX4-Autopilot$ roslaunch px4 posix_sitl.launch
… logging to /home/sumeyra/.ros/log/c22b2070-ade0-11ec-b15a-000c2971bdc0/roslaunch-ubuntu-25593.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
WARNING: disk usage in log directory [/home/sumeyra/.ros/log] is over 1GB.
It’s recommended that you use the ‘rosclean’ command.started roslaunch server http://127.0.0.1:41177/
SUMMARY
PARAMETERS
- /gazebo/enable_ros_network: True
- /rosdistro: melodic
- /rosversion: 1.14.12
- /use_sim_time: True
NODES
/
gazebo (gazebo_ros/gzserver)
gazebo_gui (gazebo_ros/gzclient)
sitl (px4/px4)
vehicle_spawn_ubuntu_25593_6292048768281433350 (gazebo_ros/spawn_model)ROS_MASTER_URI=http://127.0.0.1:11311
process[sitl-1]: started with pid [25608]
Creating symlink /home/sumeyra/PX4-Autopilot/build/px4_sitl_default/etc → /home/sumeyra/.ros/etc
| ___ \ \ \ / / / |
| |/ / \ V / / /| |
| __/ / \ / /| |
| | / /^\ \ ___ |
_| / / |_/px4 starting.
INFO [px4] Calling startup script: /bin/sh etc/init.d-posix/rcS 0
process[gazebo-2]: started with pid [25620]
INFO [init] found model autostart file as SYS_AUTOSTART=10016
INFO [param] selected parameter default file eeprom/parameters_10016
INFO [parameters] BSON document size 664 bytes, decoded 664 bytes (INT32:18, FLOAT:14)
[param] Loaded: eeprom/parameters_10016
process[gazebo_gui-3]: started with pid [25636]
process[vehicle_spawn_ubuntu_25593_6292048768281433350-4]: started with pid [25645]
INFO [dataman] data manager file ‘./dataman’ size is 7866640 bytes
PX4 SIM HOST: localhost
INFO [simulator] Waiting for simulator to accept connection on TCP port 4560
[ INFO] [1648394155.659445188]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1648394155.661512565]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting…
[ INFO] [1648394155.710522249]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1648394155.712383612]: waitForService: Service [/gazebo_gui/set_physics_properties] has not been advertised, waiting…
[INFO] [1648394156.022485, 0.000000]: Loading model XML from file /home/sumeyra/PX4-Autopilot/Tools/sitl_gazebo/models/iris/iris.sdf
[INFO] [1648394156.036130, 0.000000]: Waiting for service /gazebo/spawn_sdf_model
[ INFO] [1648394156.762773081]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1648394156.785509056, 0.020000000]: Physics dynamic reconfigure ready.
[INFO] [1648394156.945560, 0.172000]: Calling service /gazebo/spawn_sdf_model
[ INFO] [1648394157.529093180, 0.352000000]: Camera Plugin: Using the ‘robotNamespace’ param: ‘/’
[INFO] [1648394157.535198, 0.352000]: Spawn status: SpawnModel: Successfully spawned entity
[ INFO] [1648394157.550188509, 0.352000000]: Camera Plugin (ns = /) <tf_prefix_>, set to “”
[vehicle_spawn_ubuntu_25593_6292048768281433350-4] process has finished cleanly
log file: /home/sumeyra/.ros/log/c22b2070-ade0-11ec-b15a-000c2971bdc0/vehicle_spawn_ubuntu_25593_6292048768281433350-4*.log
INFO [simulator] Simulator connected on TCP port 4560.
INFO [commander] LED: open /dev/led0 failed (22)
INFO [init] Mixer: etc/mixers/quad_w.main.mix on /dev/pwm_output0
INFO [init] setting PWM_AUX_OUT none
INFO [mavlink] mode: Normal, data rate: 4000000 B/s on udp port 18570 remote port 14550
INFO [mavlink] mode: Onboard, data rate: 4000000 B/s on udp port 14580 remote port 14540
INFO [mavlink] mode: Onboard, data rate: 4000 B/s on udp port 14280 remote port 14030
INFO [mavlink] mode: Gimbal, data rate: 400000 B/s on udp port 13030 remote port 13280
INFO [logger] logger started (mode=all)
INFO [logger] Start file log (type: full)
INFO [logger] [logger] ./log/2022-03-27/15_15_58.ulg
INFO [logger] Opened full log file: ./log/2022-03-27/15_15_58.ulg
INFO [mavlink] partner IP: 127.0.0.1
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}BROADCAST = 1 to enable network)
INFO [mavlink] MAVLink only on localhost (set param MAV{i}_BROADCAST = 1 to enable network)
INFO [px4] Startup script returned successfully
pxh> INFO [mavlink] partner IP: 127.0.0.1
INFO [tone_alarm] home set
WARN [mc_pos_control] invalid setpoints
INFO [tone_alarm] notify negative
ERROR [mavlink] [timesync] Time jump detected. Resetting time synchroniser.
INFO [commander] Armed by external command
WARN [navigator] Using minimum takeoff altitude: 3.66 m
INFO [commander] Takeoff detected
WARN [mavlink] SET_POSITION_TARGET_LOCAL_NED coordinate frame 0 unsupported
WARN [mavlink] SET_POSITION_TARGET_LOCAL_NED coordinate frame 0 unsupported
WARN [mavlink] SET_POSITION_TARGET_LOCAL_NED coordinate frame 0 unsupported
WARN [mavlink] SET_POSITION_TARGET_LOCAL_NED coordinate frame 0 unsupported
WARN [mavlink] SET_POSITION_TARGET_LOCAL_NED coordinate frame 0 unsupported
WARN [mavlink] SET_POSITION_TARGET_LOCAL_NED coordinate frame 0 unsupported
WARN [mavlink] SET_POSITION_TARGET_LOCAL_NED coordinate frame 0 unsupported
WARN [mavlink] SET_POSITION_TARGET_LOCAL_NED coordinate frame 0 unsupported
WARN [mavlink] SET_POSITION_TARGET_LOCAL_NED coordinate frame 0 unsupported
WARN [mavlink] SET_POSITION_TARGET_LOCAL_NED coordinate frame 0 unsupported
WARN [commander] Failsafe enabled: No manual control stick input
INFO [commander] Failsafe mode activated
INFO [tone_alarm] battery warning (fast)
INFO [navigator] RTL HOME activated
INFO [navigator] RTL: landing at home position.
INFO [navigator] RTL: climb to 104 m (4 m above destination)
INFO [commander] Failsafe mode deactivated
INFO [navigator] RTL: return at 104 m (4 m above destination)
INFO [navigator] RTL: land at destination
INFO [commander] Landing detected
INFO [commander] Disarmed by landing
INFO [logger] closed logfile, bytes written: 17511320
ERROR [mavlink] [timesync] Time jump detected. Resetting time synchroniser.