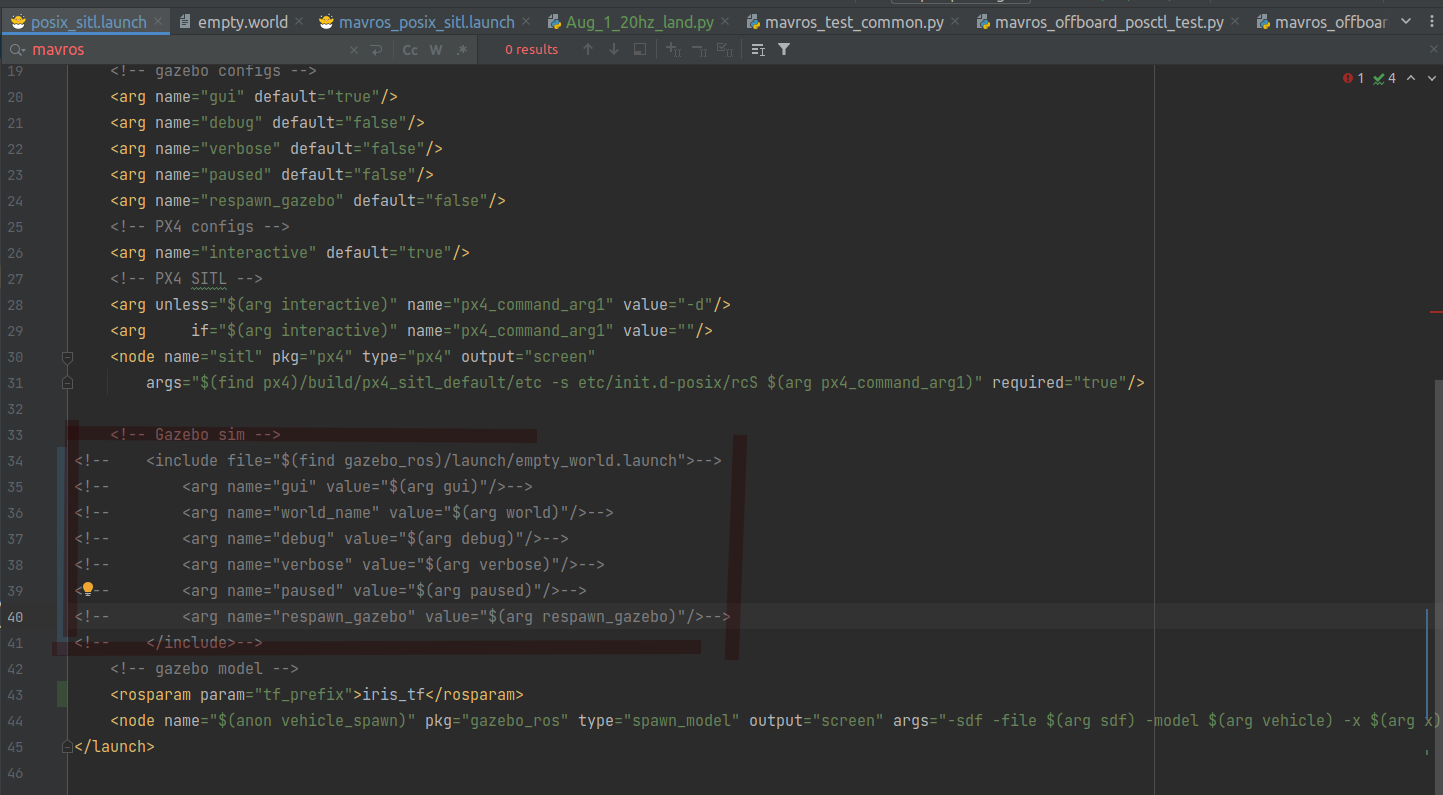
However, if I separate launch the empty_world.launch and “mavros_posix_sitl.launch”
for example
First launch , according to PX4 gazebo simulation
roslaunch gazebo_ros empty_world.launch world_name:=$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic/worlds/empty.world
Second launch
roslaunch px4 mavros_posix_sitl.launch
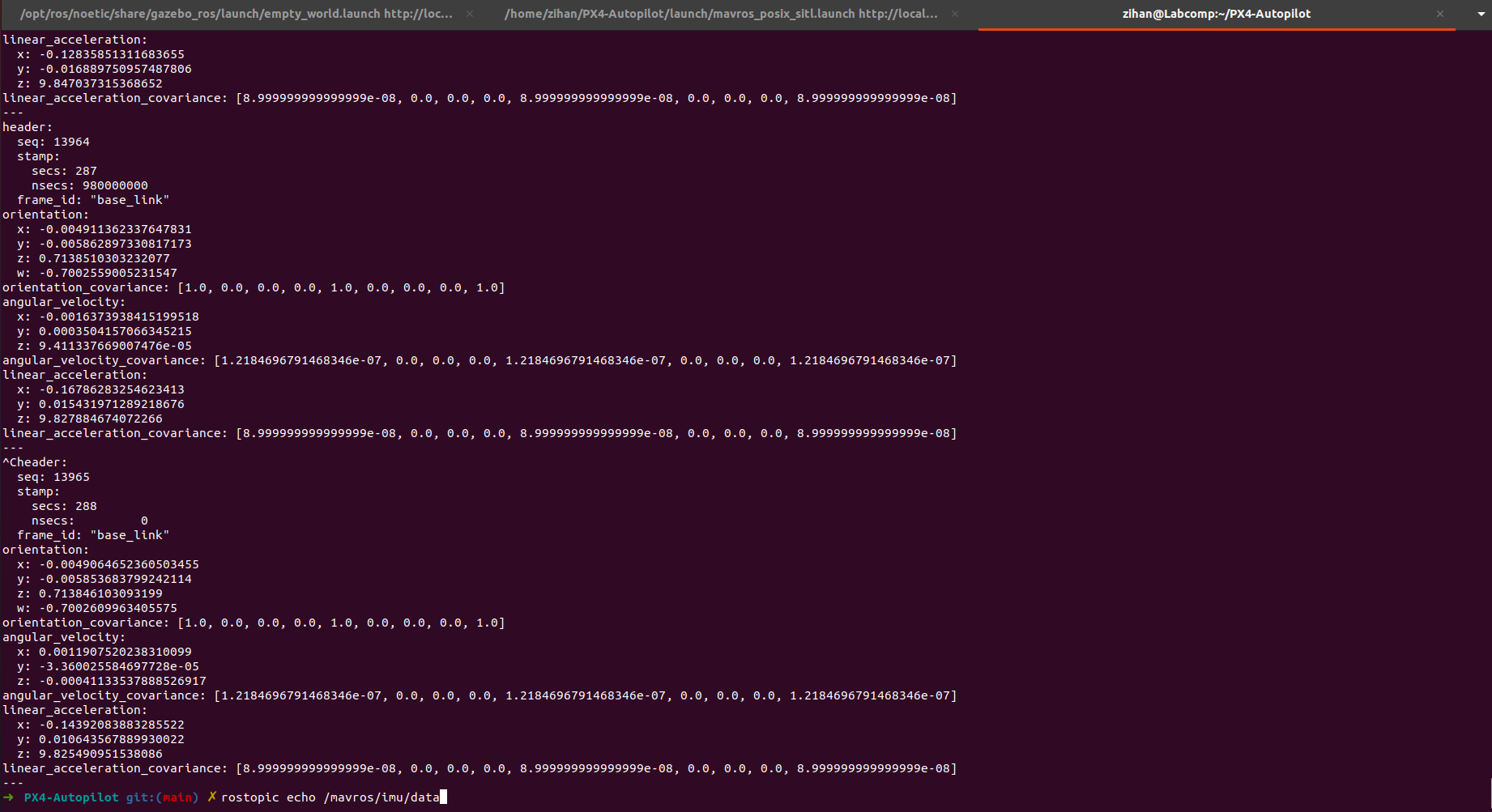
Then there is no issue, all mavros can publish
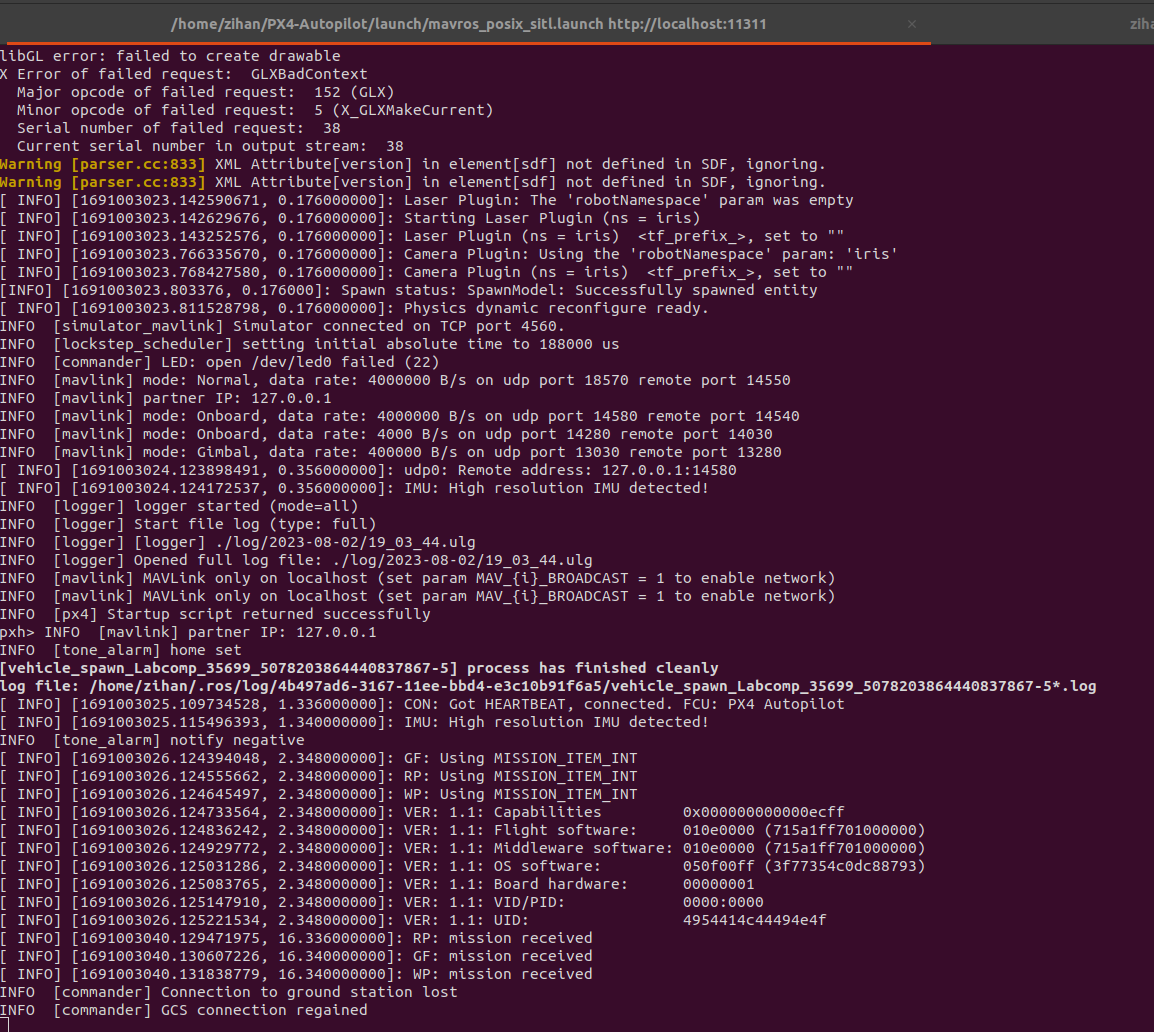
There is the log when roslaunch px4 mavros_posix_sitl.launch with gazebo environment.
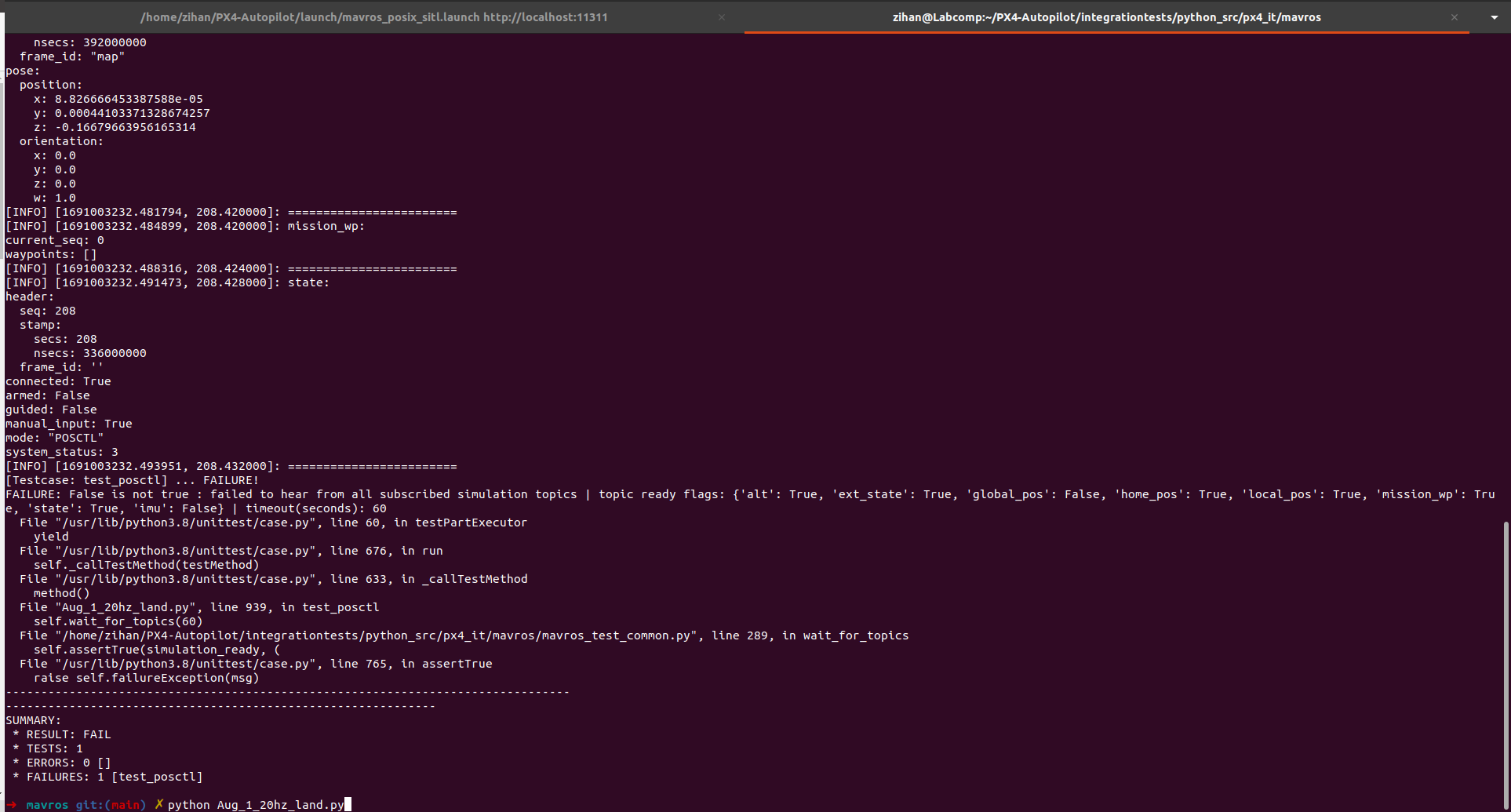
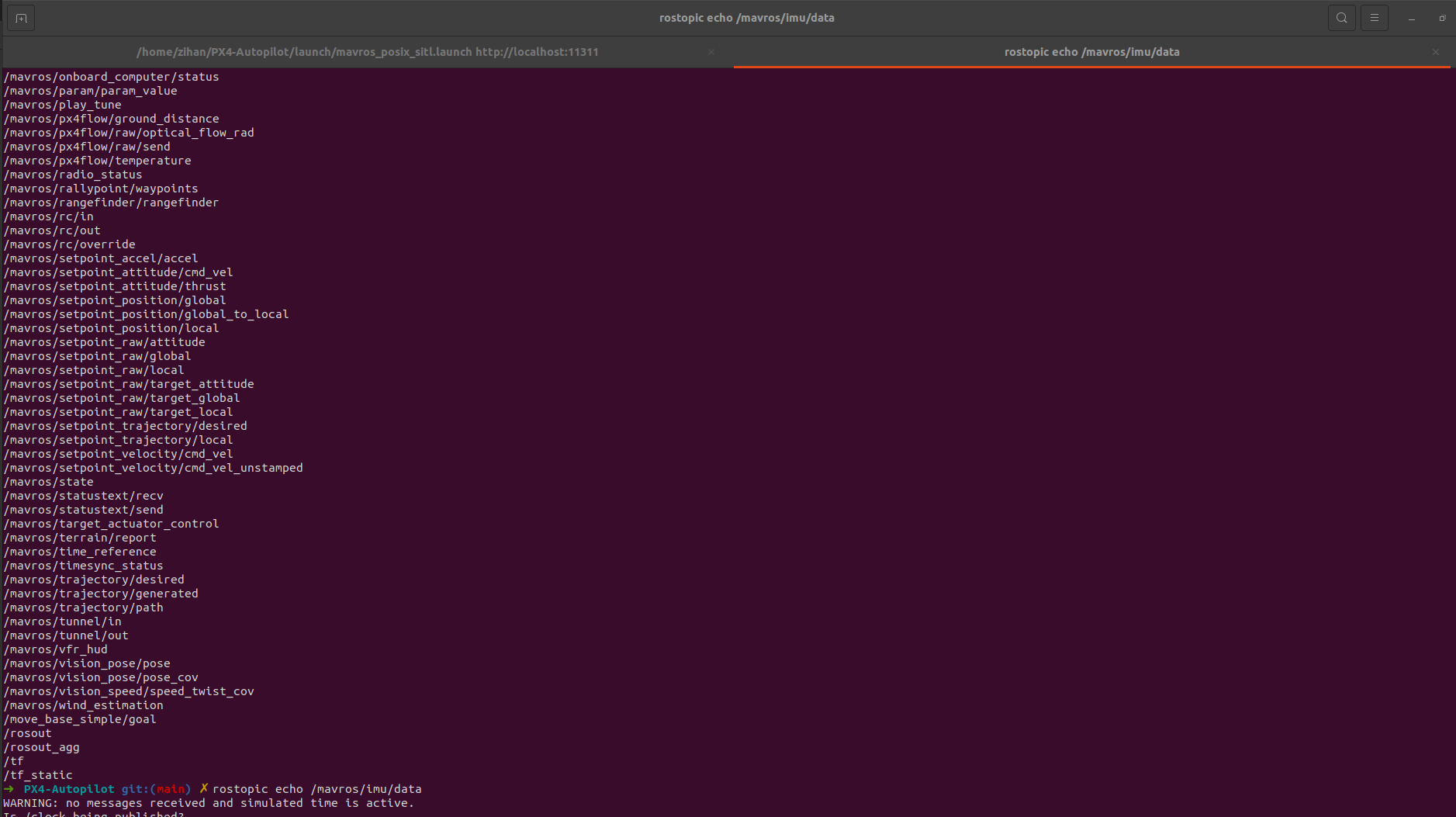
(do not publish any mavros topic)
roslaunch px4 mavros_posix_sitl.launch
... logging to /home/zihan/.ros/log/420e0658-316c-11ee-bbd4-e3c10b91f6a5/roslaunch-Labcomp-56040.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://Labcomp:45069/
SUMMARY
========
CLEAR PARAMETERS
* /mavros/
PARAMETERS
* /gazebo/enable_ros_network: True
* /mavros/camera/frame_id: base_link
* /mavros/cmd/use_comp_id_system_control: False
* /mavros/conn/heartbeat_rate: 1.0
* /mavros/conn/system_time_rate: 1.0
* /mavros/conn/timeout: 10.0
* /mavros/conn/timesync_rate: 0.0
* /mavros/distance_sensor/hrlv_ez4_pub/field_of_view: 0.0
* /mavros/distance_sensor/hrlv_ez4_pub/frame_id: hrlv_ez4_sonar
* /mavros/distance_sensor/hrlv_ez4_pub/id: 1
* /mavros/distance_sensor/hrlv_ez4_pub/orientation: PITCH_270
* /mavros/distance_sensor/hrlv_ez4_pub/send_tf: True
* /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/x: 0.0
* /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/y: 0.0
* /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/z: -0.1
* /mavros/distance_sensor/laser_1_sub/id: 3
* /mavros/distance_sensor/laser_1_sub/orientation: PITCH_270
* /mavros/distance_sensor/laser_1_sub/subscriber: True
* /mavros/distance_sensor/lidarlite_pub/field_of_view: 0.0
* /mavros/distance_sensor/lidarlite_pub/frame_id: lidarlite_laser
* /mavros/distance_sensor/lidarlite_pub/id: 0
* /mavros/distance_sensor/lidarlite_pub/orientation: PITCH_270
* /mavros/distance_sensor/lidarlite_pub/send_tf: True
* /mavros/distance_sensor/lidarlite_pub/sensor_position/x: 0.0
* /mavros/distance_sensor/lidarlite_pub/sensor_position/y: 0.0
* /mavros/distance_sensor/lidarlite_pub/sensor_position/z: -0.1
* /mavros/distance_sensor/sonar_1_sub/horizontal_fov_ratio: 1.0
* /mavros/distance_sensor/sonar_1_sub/id: 2
* /mavros/distance_sensor/sonar_1_sub/orientation: PITCH_270
* /mavros/distance_sensor/sonar_1_sub/subscriber: True
* /mavros/distance_sensor/sonar_1_sub/vertical_fov_ratio: 1.0
* /mavros/fake_gps/eph: 2.0
* /mavros/fake_gps/epv: 2.0
* /mavros/fake_gps/fix_type: 3
* /mavros/fake_gps/geo_origin/alt: 408.0
* /mavros/fake_gps/geo_origin/lat: 47.3667
* /mavros/fake_gps/geo_origin/lon: 8.55
* /mavros/fake_gps/gps_rate: 5.0
* /mavros/fake_gps/mocap_transform: True
* /mavros/fake_gps/satellites_visible: 5
* /mavros/fake_gps/tf/child_frame_id: fix
* /mavros/fake_gps/tf/frame_id: map
* /mavros/fake_gps/tf/listen: False
* /mavros/fake_gps/tf/rate_limit: 10.0
* /mavros/fake_gps/tf/send: False
* /mavros/fake_gps/use_mocap: True
* /mavros/fake_gps/use_vision: False
* /mavros/fcu_protocol: v2.0
* /mavros/fcu_url: udp://:14540@loca...
* /mavros/gcs_url:
* /mavros/global_position/child_frame_id: base_link
* /mavros/global_position/frame_id: map
* /mavros/global_position/gps_uere: 1.0
* /mavros/global_position/rot_covariance: 99999.0
* /mavros/global_position/tf/child_frame_id: base_link
* /mavros/global_position/tf/frame_id: map
* /mavros/global_position/tf/global_frame_id: earth
* /mavros/global_position/tf/send: False
* /mavros/global_position/use_relative_alt: True
* /mavros/image/frame_id: px4flow
* /mavros/imu/angular_velocity_stdev: 0.0003490659 // 0...
* /mavros/imu/frame_id: base_link
* /mavros/imu/linear_acceleration_stdev: 0.0003
* /mavros/imu/magnetic_stdev: 0.0
* /mavros/imu/orientation_stdev: 1.0
* /mavros/landing_target/camera/fov_x: 2.0071286398
* /mavros/landing_target/camera/fov_y: 2.0071286398
* /mavros/landing_target/image/height: 480
* /mavros/landing_target/image/width: 640
* /mavros/landing_target/land_target_type: VISION_FIDUCIAL
* /mavros/landing_target/listen_lt: False
* /mavros/landing_target/mav_frame: LOCAL_NED
* /mavros/landing_target/target_size/x: 0.3
* /mavros/landing_target/target_size/y: 0.3
* /mavros/landing_target/tf/child_frame_id: camera_center
* /mavros/landing_target/tf/frame_id: landing_target
* /mavros/landing_target/tf/listen: False
* /mavros/landing_target/tf/rate_limit: 10.0
* /mavros/landing_target/tf/send: True
* /mavros/local_position/frame_id: map
* /mavros/local_position/tf/child_frame_id: base_link
* /mavros/local_position/tf/frame_id: map
* /mavros/local_position/tf/send: False
* /mavros/local_position/tf/send_fcu: False
* /mavros/mission/pull_after_gcs: True
* /mavros/mission/use_mission_item_int: True
* /mavros/mocap/use_pose: True
* /mavros/mocap/use_tf: False
* /mavros/mount/debounce_s: 4.0
* /mavros/mount/err_threshold_deg: 10.0
* /mavros/mount/negate_measured_pitch: False
* /mavros/mount/negate_measured_roll: False
* /mavros/mount/negate_measured_yaw: False
* /mavros/odometry/fcu/odom_child_id_des: base_link
* /mavros/odometry/fcu/odom_parent_id_des: map
* /mavros/plugin_blacklist: ['safety_area', '...
* /mavros/plugin_whitelist: []
* /mavros/px4flow/frame_id: px4flow
* /mavros/px4flow/ranger_fov: 0.118682
* /mavros/px4flow/ranger_max_range: 5.0
* /mavros/px4flow/ranger_min_range: 0.3
* /mavros/safety_area/p1/x: 1.0
* /mavros/safety_area/p1/y: 1.0
* /mavros/safety_area/p1/z: 1.0
* /mavros/safety_area/p2/x: -1.0
* /mavros/safety_area/p2/y: -1.0
* /mavros/safety_area/p2/z: -1.0
* /mavros/setpoint_accel/send_force: False
* /mavros/setpoint_attitude/reverse_thrust: False
* /mavros/setpoint_attitude/tf/child_frame_id: target_attitude
* /mavros/setpoint_attitude/tf/frame_id: map
* /mavros/setpoint_attitude/tf/listen: False
* /mavros/setpoint_attitude/tf/rate_limit: 50.0
* /mavros/setpoint_attitude/use_quaternion: False
* /mavros/setpoint_position/mav_frame: LOCAL_NED
* /mavros/setpoint_position/tf/child_frame_id: target_position
* /mavros/setpoint_position/tf/frame_id: map
* /mavros/setpoint_position/tf/listen: False
* /mavros/setpoint_position/tf/rate_limit: 50.0
* /mavros/setpoint_raw/thrust_scaling: 1.0
* /mavros/setpoint_velocity/mav_frame: LOCAL_NED
* /mavros/startup_px4_usb_quirk: False
* /mavros/sys/disable_diag: False
* /mavros/sys/min_voltage: 10.0
* /mavros/target_component_id: 1
* /mavros/target_system_id: 1
* /mavros/tdr_radio/low_rssi: 40
* /mavros/time/time_ref_source: fcu
* /mavros/time/timesync_avg_alpha: 0.6
* /mavros/time/timesync_mode: MAVLINK
* /mavros/vibration/frame_id: base_link
* /mavros/vision_pose/tf/child_frame_id: vision_estimate
* /mavros/vision_pose/tf/frame_id: odom
* /mavros/vision_pose/tf/listen: False
* /mavros/vision_pose/tf/rate_limit: 10.0
* /mavros/vision_speed/listen_twist: True
* /mavros/vision_speed/twist_cov: True
* /mavros/wheel_odometry/child_frame_id: base_link
* /mavros/wheel_odometry/count: 2
* /mavros/wheel_odometry/frame_id: odom
* /mavros/wheel_odometry/send_raw: True
* /mavros/wheel_odometry/send_twist: False
* /mavros/wheel_odometry/tf/child_frame_id: base_link
* /mavros/wheel_odometry/tf/frame_id: odom
* /mavros/wheel_odometry/tf/send: False
* /mavros/wheel_odometry/use_rpm: False
* /mavros/wheel_odometry/vel_error: 0.1
* /mavros/wheel_odometry/wheel0/radius: 0.05
* /mavros/wheel_odometry/wheel0/x: 0.0
* /mavros/wheel_odometry/wheel0/y: -0.15
* /mavros/wheel_odometry/wheel1/radius: 0.05
* /mavros/wheel_odometry/wheel1/x: 0.0
* /mavros/wheel_odometry/wheel1/y: 0.15
* /rosdistro: noetic
* /rosversion: 1.16.0
* /tf_prefix: iris_tf
* /use_sim_time: True
NODES
/
gazebo (gazebo_ros/gzserver)
gazebo_gui (gazebo_ros/gzclient)
mavros (mavros/mavros_node)
sitl (px4/px4)
vehicle_spawn_Labcomp_56040_2477356088420129964 (gazebo_ros/spawn_model)
auto-starting new master
process[master]: started with pid [56059]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 420e0658-316c-11ee-bbd4-e3c10b91f6a5
process[rosout-1]: started with pid [56080]
started core service [/rosout]
process[sitl-2]: started with pid [56088]
______ __ __ ___
| ___ \ \ \ / / / |
| |_/ / \ V / / /| |
| __/ / \ / /_| |
| | / /^\ \ \___ |
\_| \/ \/ |_/
px4 starting.
INFO [px4] startup script: /bin/sh etc/init.d-posix/rcS 0
process[gazebo-3]: started with pid [56099]
INFO [init] found model autostart file as SYS_AUTOSTART=10015
process[gazebo_gui-4]: started with pid [56110]
INFO [param] selected parameter default file parameters.bson
INFO [param] importing from 'parameters.bson'
INFO [parameters] BSON document size 274 bytes, decoded 274 bytes (INT32:11, FLOAT:3)
INFO [param] selected parameter backup file parameters_backup.bson
process[vehicle_spawn_Labcomp_56040_2477356088420129964-5]: started with pid [56121]
process[mavros-6]: started with pid [56128]
[ INFO] [1691005153.810005255]: FCU URL: udp://:14540@localhost:14557
[ INFO] [1691005153.813378674]: udp0: Bind address: 0.0.0.0:14540
[ INFO] [1691005153.813494717]: udp0: Remote address: 127.0.0.1:14557
[ INFO] [1691005153.813674285]: GCS bridge disabled
INFO [dataman] data manager file './dataman' size is 7866640 bytes
[ INFO] [1691005153.825177750]: Plugin 3dr_radio loaded
[ INFO] [1691005153.826788882]: Plugin 3dr_radio initialized
[ INFO] [1691005153.826946353]: Plugin actuator_control loaded
[ INFO] [1691005153.829719266]: Plugin actuator_control initialized
etc/init.d-posix/rcS: 39: [: Illegal number:
INFO [init] PX4_SIM_HOSTNAME: localhost
INFO [simulator_mavlink] Waiting for simulator to accept connection on TCP port 4560
[ INFO] [1691005153.835080167]: Plugin adsb loaded
[ INFO] [1691005153.838069704]: Plugin adsb initialized
[ INFO] [1691005153.838254326]: Plugin altitude loaded
[ INFO] [1691005153.839291611]: Plugin altitude initialized
[ INFO] [1691005153.839461054]: Plugin cam_imu_sync loaded
[ INFO] [1691005153.840318395]: Plugin cam_imu_sync initialized
[ INFO] [1691005153.840487114]: Plugin camera loaded
[ INFO] [1691005153.841252873]: Plugin camera initialized
[ INFO] [1691005153.841437250]: Plugin cellular_status loaded
[ INFO] [1691005153.843755082]: Plugin cellular_status initialized
[ INFO] [1691005153.843976090]: Plugin command loaded
[ INFO] [1691005153.849687820]: Plugin command initialized
[ INFO] [1691005153.849848111]: Plugin companion_process_status loaded
[ INFO] [1691005153.851178812]: Plugin companion_process_status initialized
[ INFO] [1691005153.851296730]: Plugin debug_value loaded
[ INFO] [1691005153.854270819]: Plugin debug_value initialized
[ INFO] [1691005153.854423832]: Plugin distance_sensor loaded
[ INFO] [1691005153.867246668]: Plugin distance_sensor initialized
[ INFO] [1691005153.867433900]: Plugin esc_status loaded
[ INFO] [1691005153.868340311]: Plugin esc_status initialized
[ INFO] [1691005153.868499095]: Plugin esc_telemetry loaded
[ INFO] [1691005153.869129596]: Plugin esc_telemetry initialized
[ INFO] [1691005153.869299825]: Plugin fake_gps loaded
[ INFO] [1691005153.879074523]: Plugin fake_gps initialized
[ INFO] [1691005153.879319066]: Plugin ftp loaded
[ INFO] [1691005153.884608481]: Plugin ftp initialized
[ INFO] [1691005153.884812302]: Plugin geofence loaded
[ INFO] [1691005153.887534175]: Plugin geofence initialized
[ INFO] [1691005153.887695419]: Plugin global_position loaded
[ INFO] [1691005153.897714275]: Plugin global_position initialized
[ INFO] [1691005153.897875913]: Plugin gps_input loaded
[ INFO] [1691005153.899286489]: Plugin gps_input initialized
[ INFO] [1691005153.899403918]: Plugin gps_rtk loaded
[ INFO] [1691005153.901269262]: Plugin gps_rtk initialized
[ INFO] [1691005153.901410080]: Plugin gps_status loaded
[ INFO] [1691005153.902857558]: Plugin gps_status initialized
[ INFO] [1691005153.903037481]: Plugin guided_target loaded
[ INFO] [1691005153.905524474]: Plugin guided_target initialized
[ INFO] [1691005153.905716271]: Plugin hil loaded
[ INFO] [1691005153.913212048]: Plugin hil initialized
[ INFO] [1691005153.913338567]: Plugin home_position loaded
[ INFO] [1691005153.915414456]: Plugin home_position initialized
[ INFO] [1691005153.915588198]: Plugin imu loaded
[ INFO] [1691005153.920538523]: Plugin imu initialized
[ INFO] [1691005153.920651452]: Plugin landing_target loaded
[ INFO] [1691005153.928176546]: Plugin landing_target initialized
[ INFO] [1691005153.928315831]: Plugin local_position loaded
[ INFO] [1691005153.931828197]: Plugin local_position initialized
[ INFO] [1691005153.931945941]: Plugin log_transfer loaded
[ INFO] [1691005153.934292064]: Plugin log_transfer initialized
[ INFO] [1691005153.934413227]: Plugin mag_calibration_status loaded
[ INFO] [1691005153.935149031]: Plugin mag_calibration_status initialized
[ INFO] [1691005153.935265363]: Plugin manual_control loaded
[ INFO] [1691005153.937201098]: Plugin manual_control initialized
[ INFO] [1691005153.937403816]: Plugin mocap_pose_estimate loaded
[ INFO] [1691005153.939578894]: Plugin mocap_pose_estimate initialized
[ INFO] [1691005153.939816031]: Plugin mount_control loaded
[ WARN] [1691005153.943301957]: Could not retrive negate_measured_roll parameter value, using default (0)
[ WARN] [1691005153.943491119]: Could not retrive negate_measured_pitch parameter value, using default (0)
[ WARN] [1691005153.943708041]: Could not retrive negate_measured_yaw parameter value, using default (0)
[ WARN] [1691005153.944441440]: Could not retrive debounce_s parameter value, using default (4.000000)
[ WARN] [1691005153.944655099]: Could not retrive err_threshold_deg parameter value, using default (10.000000)
[ INFO] [1691005153.944701439]: Plugin mount_control initialized
[ INFO] [1691005153.944805051]: Plugin nav_controller_output loaded
[ INFO] [1691005153.945189512]: Plugin nav_controller_output initialized
[ INFO] [1691005153.945262101]: Plugin obstacle_distance loaded
[ INFO] [1691005153.946717750]: Plugin obstacle_distance initialized
[ INFO] [1691005153.946863004]: Plugin odom loaded
[ INFO] [1691005153.949572110]: Plugin odom initialized
[ INFO] [1691005153.949707128]: Plugin onboard_computer_status loaded
[ INFO] [1691005153.950952932]: Plugin onboard_computer_status initialized
[ INFO] [1691005153.951144849]: Plugin param loaded
[ INFO] [1691005153.953245906]: Plugin param initialized
[ INFO] [1691005153.953398730]: Plugin play_tune loaded
[ INFO] [1691005153.954898030]: Plugin play_tune initialized
[ INFO] [1691005153.955027560]: Plugin px4flow loaded
[ INFO] [1691005153.958545329]: Plugin px4flow initialized
[ INFO] [1691005153.958718758]: Plugin rallypoint loaded
[ INFO] [1691005153.960315170]: Plugin rallypoint initialized
[ INFO] [1691005153.960468601]: Plugin rangefinder loaded
[ INFO] [1691005153.960887309]: Plugin rangefinder initialized
[ INFO] [1691005153.961080673]: Plugin rc_io loaded
[ INFO] [1691005153.963150342]: Plugin rc_io initialized
[ INFO] [1691005153.963191801]: Plugin safety_area blacklisted
[ INFO] [1691005153.963344122]: Plugin setpoint_accel loaded
[ INFO] [1691005153.964963017]: Plugin setpoint_accel initialized
[ INFO] [1691005153.965221424]: Plugin setpoint_attitude loaded
[ INFO] [1691005153.971622678]: Plugin setpoint_attitude initialized
[ INFO] [1691005153.971831175]: Plugin setpoint_position loaded
[ INFO] [1691005153.981743414]: Plugin setpoint_position initialized
[ INFO] [1691005153.981923001]: Plugin setpoint_raw loaded
[ INFO] [1691005153.987164007]: Plugin setpoint_raw initialized
[ INFO] [1691005153.987349985]: Plugin setpoint_trajectory loaded
[ INFO] [1691005153.989968700]: Plugin setpoint_trajectory initialized
[ INFO] [1691005153.990140369]: Plugin setpoint_velocity loaded
[ INFO] [1691005153.993167975]: Plugin setpoint_velocity initialized
[ INFO] [1691005153.993553268]: Plugin sys_status loaded
[ INFO] [1691005154.001254604]: Plugin sys_status initialized
[ INFO] [1691005154.001458978]: Plugin sys_time loaded
[ INFO] [1691005154.004847915]: TM: Timesync mode: MAVLINK
[ INFO] [1691005154.005096980]: TM: Not publishing sim time
[ INFO] [1691005154.005808523]: Plugin sys_time initialized
[ INFO] [1691005154.005937274]: Plugin terrain loaded
[ INFO] [1691005154.006381283]: Plugin terrain initialized
[ INFO] [1691005154.006473628]: Plugin trajectory loaded
[ INFO] [1691005154.009690149]: Plugin trajectory initialized
[ INFO] [1691005154.009811346]: Plugin tunnel loaded
[ INFO] [1691005154.011349749]: Plugin tunnel initialized
[ INFO] [1691005154.011461568]: Plugin vfr_hud loaded
[ INFO] [1691005154.011828728]: Plugin vfr_hud initialized
[ INFO] [1691005154.011851004]: Plugin vibration blacklisted
[ INFO] [1691005154.011956902]: Plugin vision_pose_estimate loaded
[ INFO] [1691005154.015833964]: Plugin vision_pose_estimate initialized
[ INFO] [1691005154.015952216]: Plugin vision_speed_estimate loaded
[ INFO] [1691005154.018047346]: Plugin vision_speed_estimate initialized
[ INFO] [1691005154.018186875]: Plugin waypoint loaded
[ INFO] [1691005154.020805452]: Plugin waypoint initialized
[ INFO] [1691005154.020840732]: Plugin wheel_odometry blacklisted
[ INFO] [1691005154.020991773]: Plugin wind_estimation loaded
[ INFO] [1691005154.021527544]: Plugin wind_estimation initialized
[ INFO] [1691005154.021694220]: Built-in SIMD instructions: SSE, SSE2
[ INFO] [1691005154.021712256]: Built-in MAVLink package version: 2023.6.6
[ INFO] [1691005154.021733526]: Known MAVLink dialects: common ardupilotmega ASLUAV AVSSUAS all csAirLink cubepilot development icarous matrixpilot paparazzi standard storm32 uAvionix ualberta
[ INFO] [1691005154.021751318]: MAVROS started. MY ID 1.240, TARGET ID 1.1
[INFO] [1691005154.079991, 0.000000]: Loading model XML from file /home/zihan/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/iris/iris.sdf
[INFO] [1691005154.084317, 0.000000]: Waiting for service /gazebo/spawn_sdf_model
[ INFO] [1691005154.269889647]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1691005154.270679662]: waitForService: Service [/gazebo_gui/set_physics_properties] has not been advertised, waiting...
[ INFO] [1691005154.308499562]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1691005154.309333846]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[ INFO] [1691005154.801761124]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1691005154.815540810, 0.008000000]: Physics dynamic reconfigure ready.
[INFO] [1691005154.990254, 0.180000]: Calling service /gazebo/spawn_sdf_model
Warning [parser.cc:833] XML Attribute[version] in element[sdf] not defined in SDF, ignoring.
[INFO] [1691005155.304670, 0.376000]: Spawn status: SpawnModel: Successfully spawned entity
INFO [simulator_mavlink] Simulator connected on TCP port 4560.
INFO [lockstep_scheduler] setting initial absolute time to 388000 us
INFO [commander] LED: open /dev/led0 failed (22)
INFO [mavlink] mode: Normal, data rate: 4000000 B/s on udp port 18570 remote port 14550
INFO [mavlink] partner IP: 127.0.0.1
INFO [mavlink] mode: Onboard, data rate: 4000000 B/s on udp port 14580 remote port 14540
INFO [mavlink] mode: Onboard, data rate: 4000 B/s on udp port 14280 remote port 14030
INFO [mavlink] mode: Gimbal, data rate: 400000 B/s on udp port 13030 remote port 13280
[ INFO] [1691005155.637932666, 0.552000000]: udp0: Remote address: 127.0.0.1:14580
[ INFO] [1691005155.638161379, 0.552000000]: IMU: High resolution IMU detected!
INFO [logger] logger started (mode=all)
INFO [logger] Start file log (type: full)
INFO [logger] [logger] ./log/2023-08-02/19_39_15.ulg
INFO [logger] Opened full log file: ./log/2023-08-02/19_39_15.ulg
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [px4] Startup script returned successfully
pxh> INFO [mavlink] partner IP: 127.0.0.1
[vehicle_spawn_Labcomp_56040_2477356088420129964-5] process has finished cleanly
log file: /home/zihan/.ros/log/420e0658-316c-11ee-bbd4-e3c10b91f6a5/vehicle_spawn_Labcomp_56040_2477356088420129964-5*.log
INFO [tone_alarm] home set
[ INFO] [1691005156.620308673, 1.532000000]: CON: Got HEARTBEAT, connected. FCU: PX4 Autopilot
[ INFO] [1691005156.621682034, 1.532000000]: IMU: High resolution IMU detected!
INFO [tone_alarm] notify negative
[ INFO] [1691005157.631736873, 2.540000000]: GF: Using MISSION_ITEM_INT
[ INFO] [1691005157.631950287, 2.540000000]: RP: Using MISSION_ITEM_INT
[ INFO] [1691005157.632097887, 2.540000000]: WP: Using MISSION_ITEM_INT
[ INFO] [1691005157.632282860, 2.540000000]: VER: 1.1: Capabilities 0x000000000000ecff
[ INFO] [1691005157.632458383, 2.540000000]: VER: 1.1: Flight software: 010e0000 (715a1ff701000000)
[ INFO] [1691005157.632582836, 2.540000000]: VER: 1.1: Middleware software: 010e0000 (715a1ff701000000)
[ INFO] [1691005157.632720685, 2.540000000]: VER: 1.1: OS software: 050f00ff (3f77354c0dc88793)
[ INFO] [1691005157.632797336, 2.540000000]: VER: 1.1: Board hardware: 00000001
[ INFO] [1691005157.632863521, 2.540000000]: VER: 1.1: VID/PID: 0000:0000
[ INFO] [1691005157.632929137, 2.540000000]: VER: 1.1: UID: 4954414c44494e4f
[ INFO] [1691005171.637655456, 16.532000000]: GF: mission received
[ INFO] [1691005171.638085100, 16.532000000]: WP: mission received
[ INFO] [1691005171.638300786, 16.532000000]: RP: mission received