Anyone have advice on how to get fixed wing HIL working with X-plane?
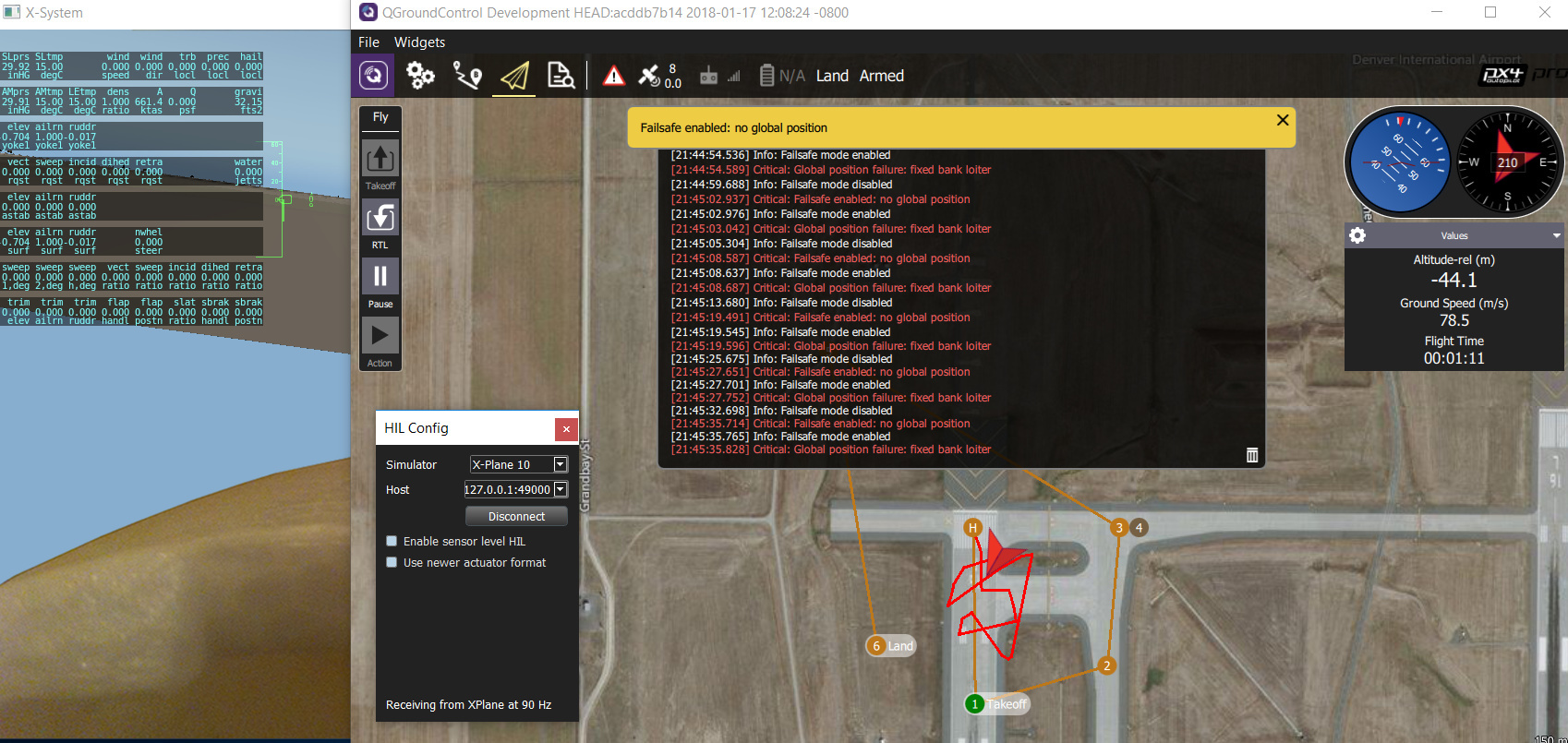
We’ve tried this on multiple window’s laptops of varying horsepower and pretty much every time we try to takeoff the aircraft just flies/flops around chaotically with constant loss of global position errors.
We’ve tried PX4 master several times over the past couple weeks as well as 1.7.4beta. HILstar vehicle model on the autopilot. Pixracer hardware.
We are having the same issue. We even got the data rate from XPlane up to 100 Hz and still get the issue. We are not completely sure what causes it but one source could be the QGC XPlane link inplementation which sometimes seems to lag. Another is that according to Paul Riseborough the estimator should run at least at 125 Hz. As the estimator runs at the publication rate of sensor_combined in HIL the estimator runs below this minimum rate.
We made the HIL simulation run on average for five minutes, sometimes up to 20 minutes but never fully reliable. I guess with the current estimator this is also not possible unless all the issues are caused by QGC.
You do need a fairly potent machine to run the sim and QGC. I can run it for over 1hr with occasional dropouts. X-Plane 11 (make sure you apply latest updates). I am running quite old firmware though.
X-plane HIL seems to be working again in Windows now that this fix has made it into the QGC daily builds. https://github.com/mavlink/qgroundcontrol/pull/6366
thanks for the replies.