Hello,
When looking at the fmu and px4io status of a quad vs rover (both on Pixhawk 2.1, both with px4fmu-v3) there are some differences that are apparent and that I need to address, but am not sure where to focus. Below is the quad status:
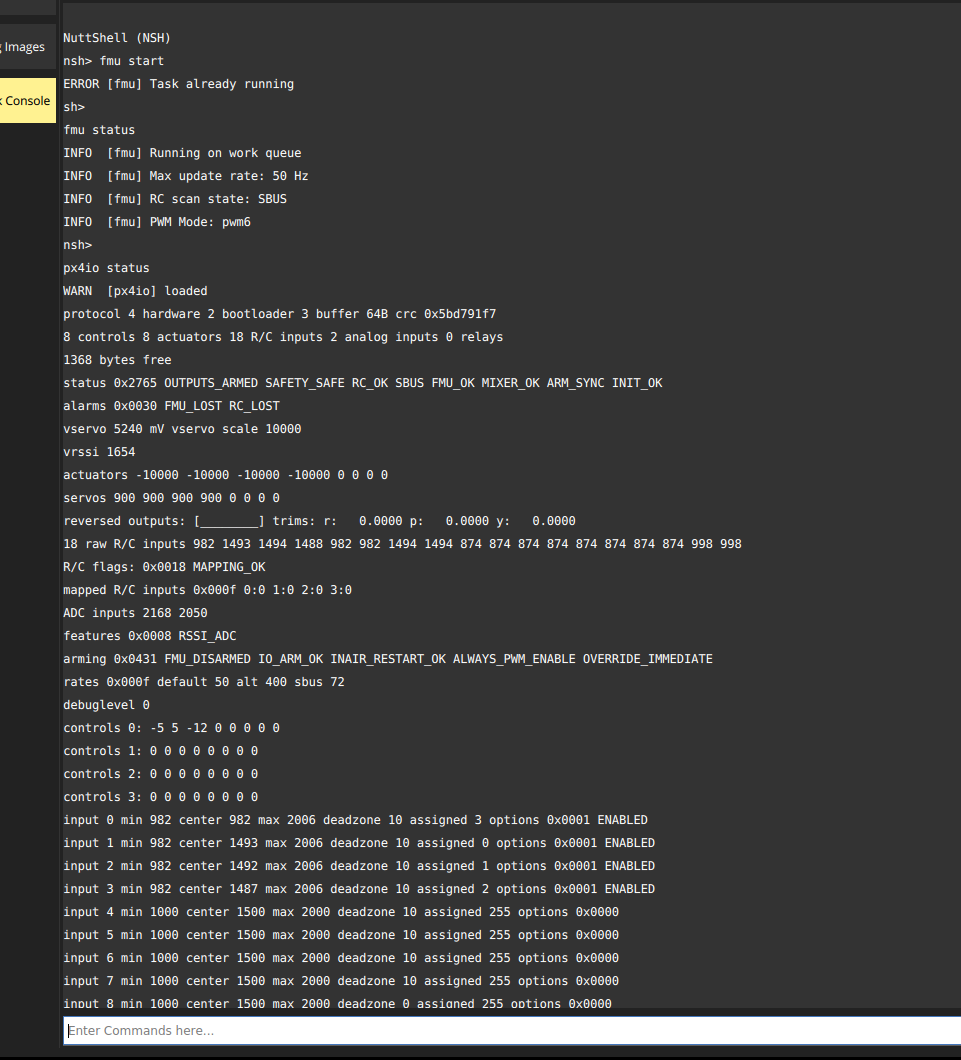
Note that the pwm mode is pwm6, the checks are all “ok”, the actuators have values, the servos are receiving signal.
However, below is the rover status:

There is no pwm, several checks are bad, flat actuator values, and no signal to servos.
Which files / areas do I need to be concentrating on to address these issues with the rover?
Thanks