Nihao guys,
PX4 version: 1.14.2
EKF2_EV_CTRL: 9 (Horizontal + Yaw)
Log URL: https://review.px4.io/plot_app?log=0162163c-9f74-47aa-bf94-c63f24da29c1
I am currently working on VIO outdoor autonomous flight under mission mode via External Vision. I specifically published nav_msgs/Odometry message to mavros/odometry/out.
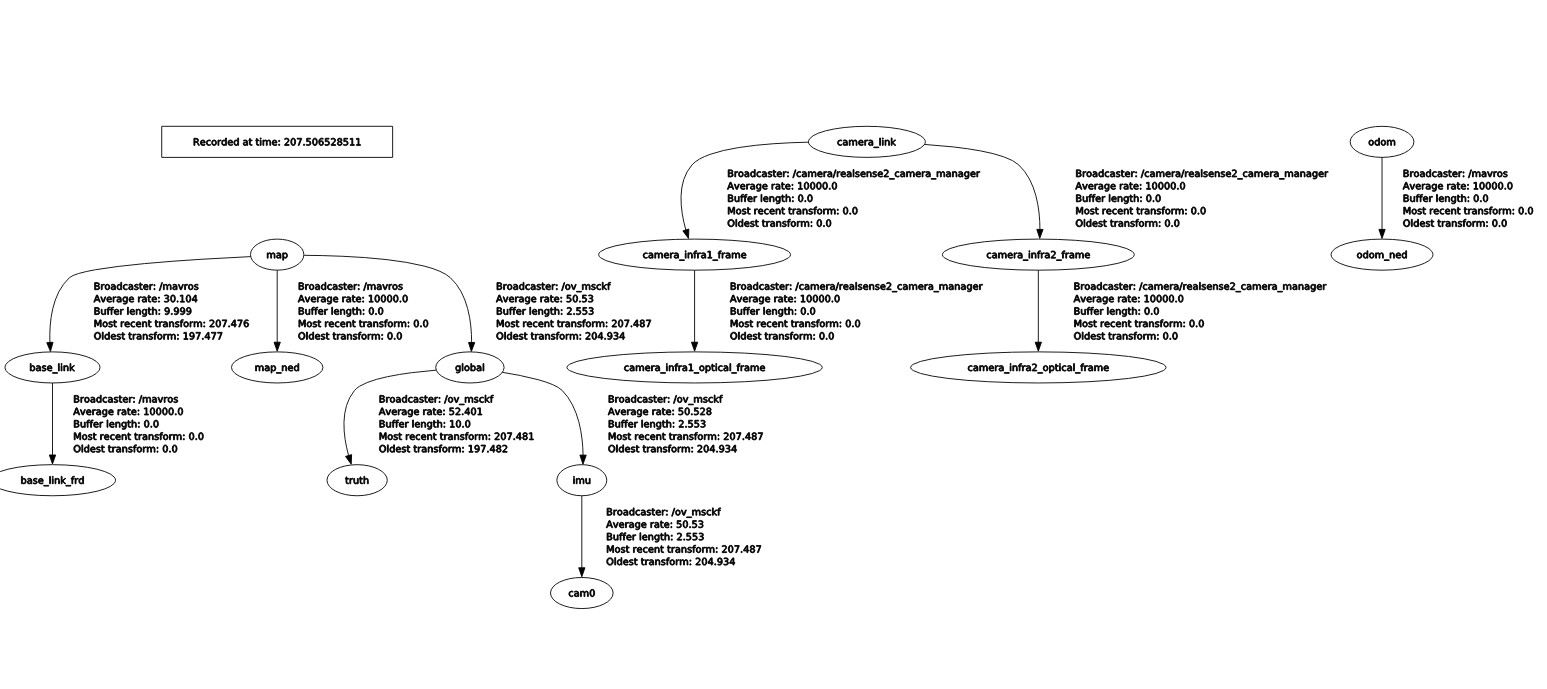
I assumed the coordinate system in MAVROS should all be in ENU convention, thus I further confirmed the coordination system of my VIO algorithm is in ENU convention and is also aligned with world frame since I had written a static transform to handle the transformation between {map} frame of MAVROS to {global} frame of visual algorithm. Below is my tf tree.
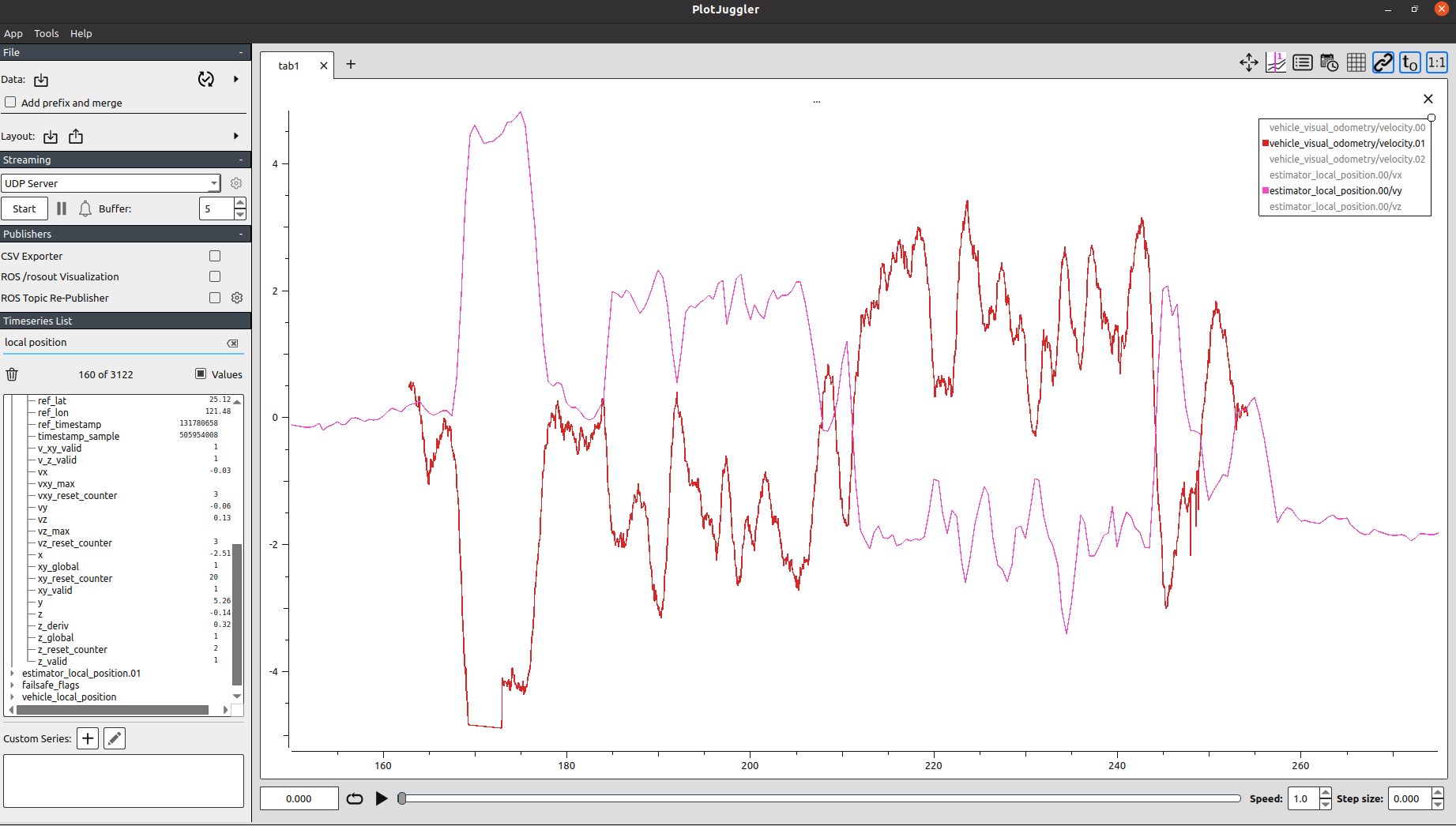
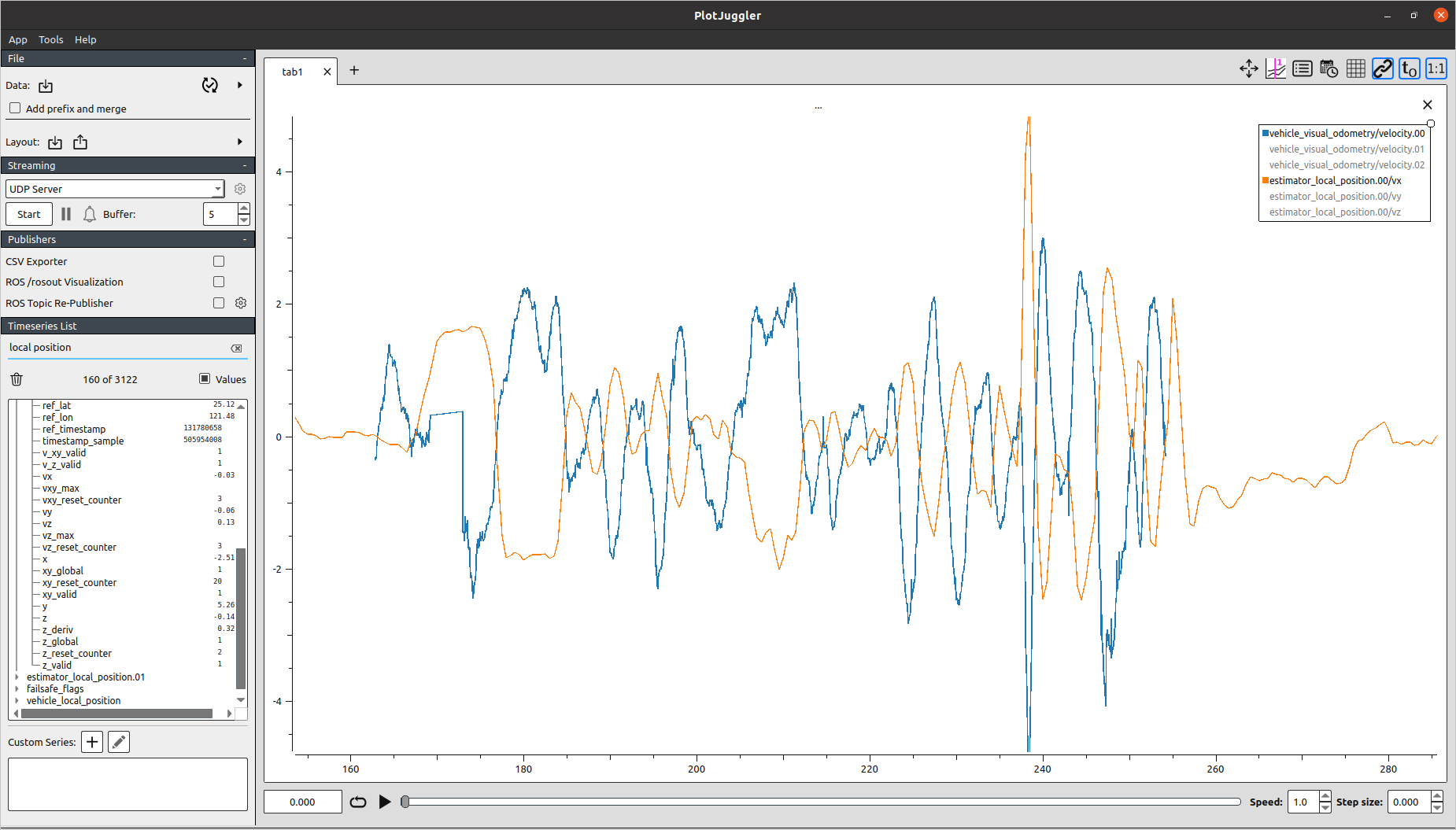
And here are my uORB topics. You can see the value between visual odometry and estimator are almost aligned but with an exact sign difference. I feel like this issue is not related to ENU to NED transformation. Please feel free to tell me what is the root cause of this problem.
Thanks for reading my question.
Best,
PH Lai