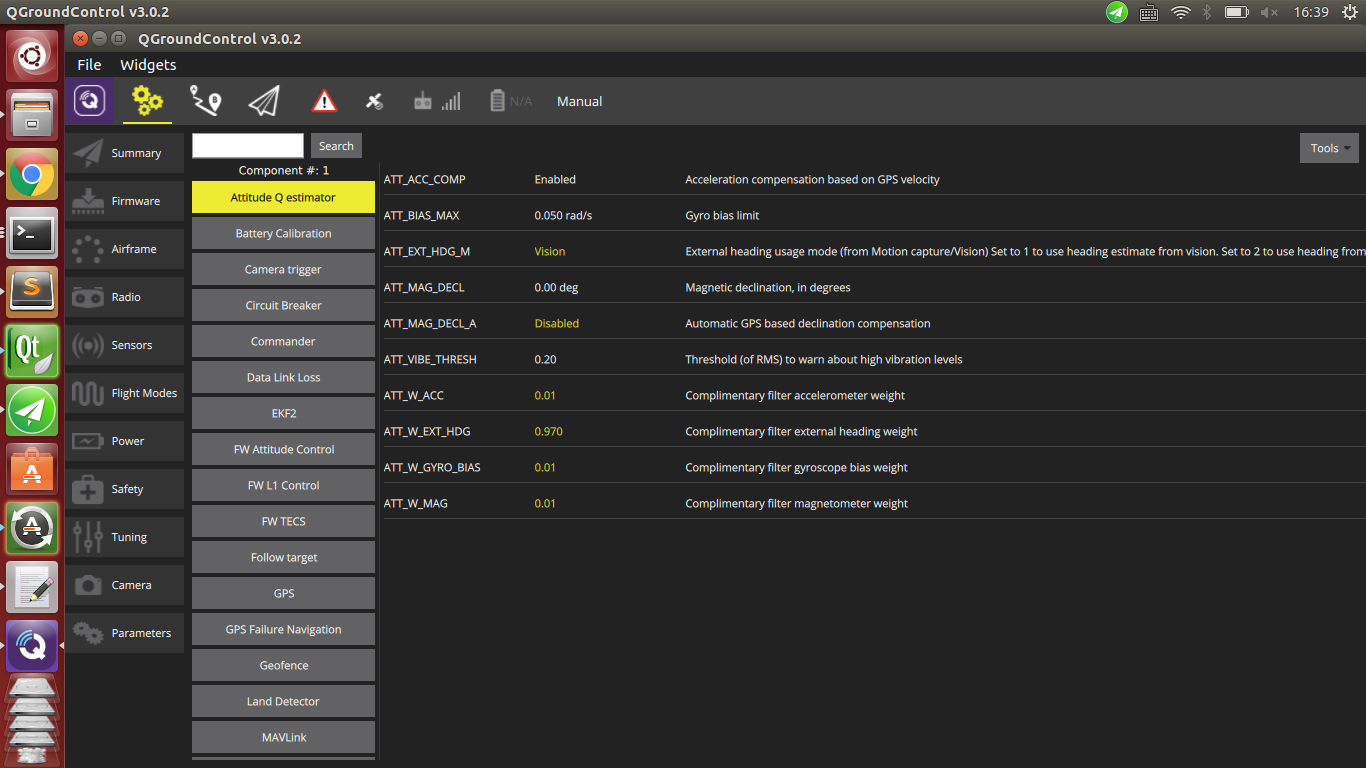
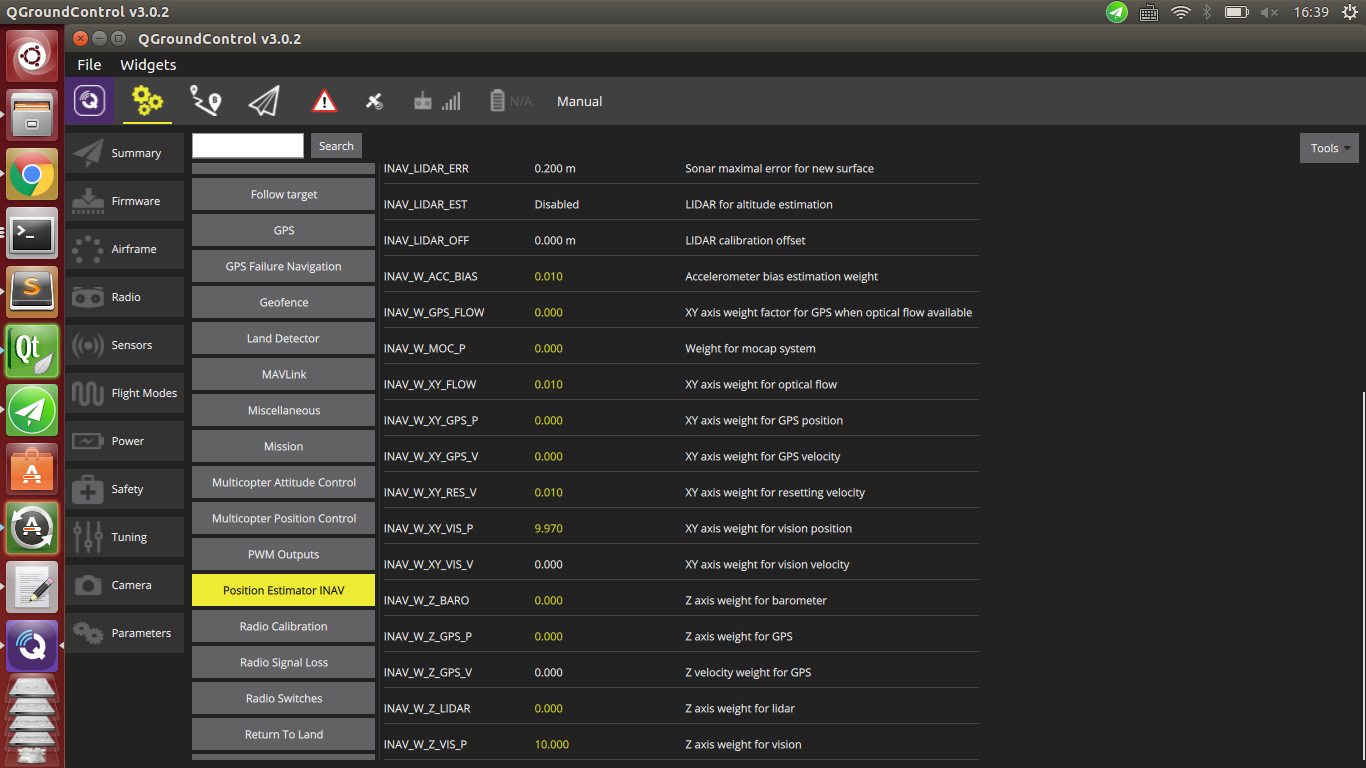
I want to use external vision to localize my drone. My version is v1.4.1 and I use INAV&attitude_estimator_q. I have set ATT_W_EXT_HDG=0.97 and ATT_EXT_HDG_M = Vision as picture following. I also set parameters of Position Estimator INAV.
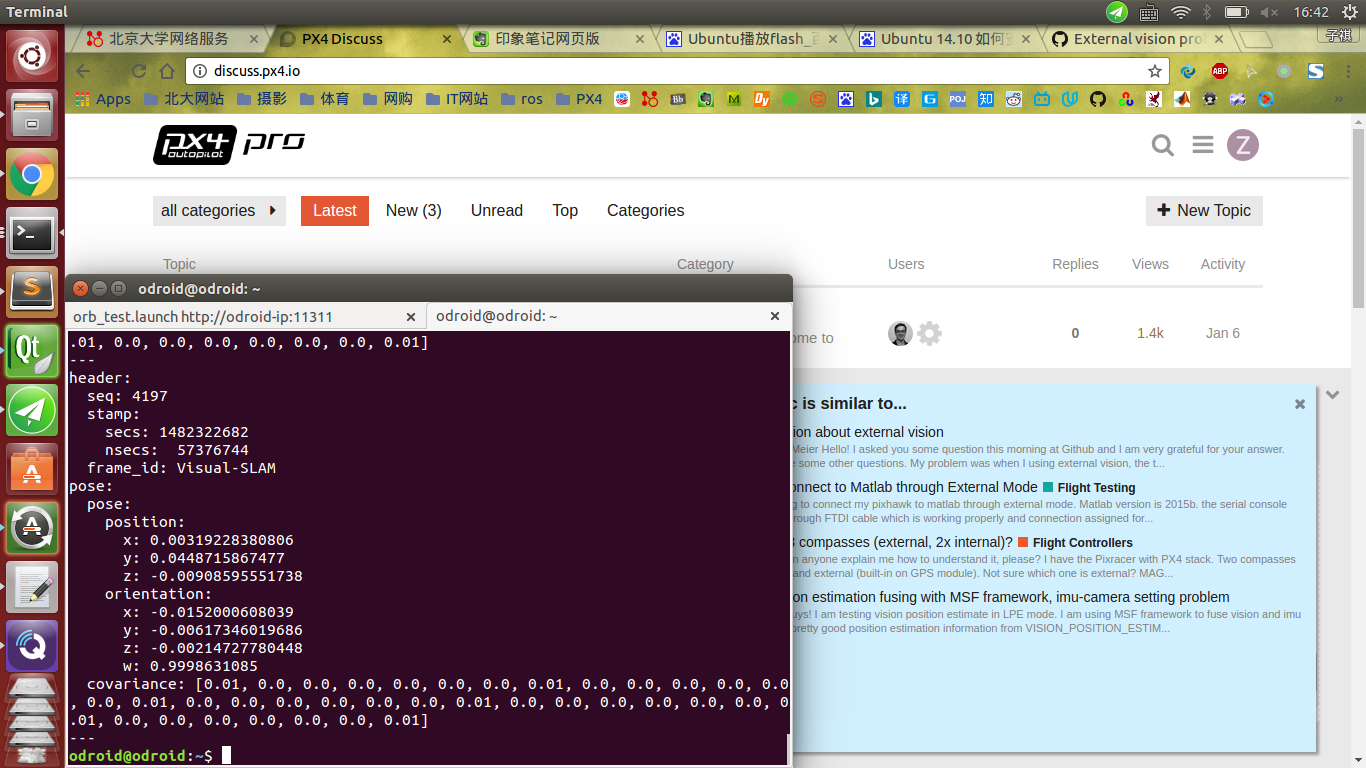
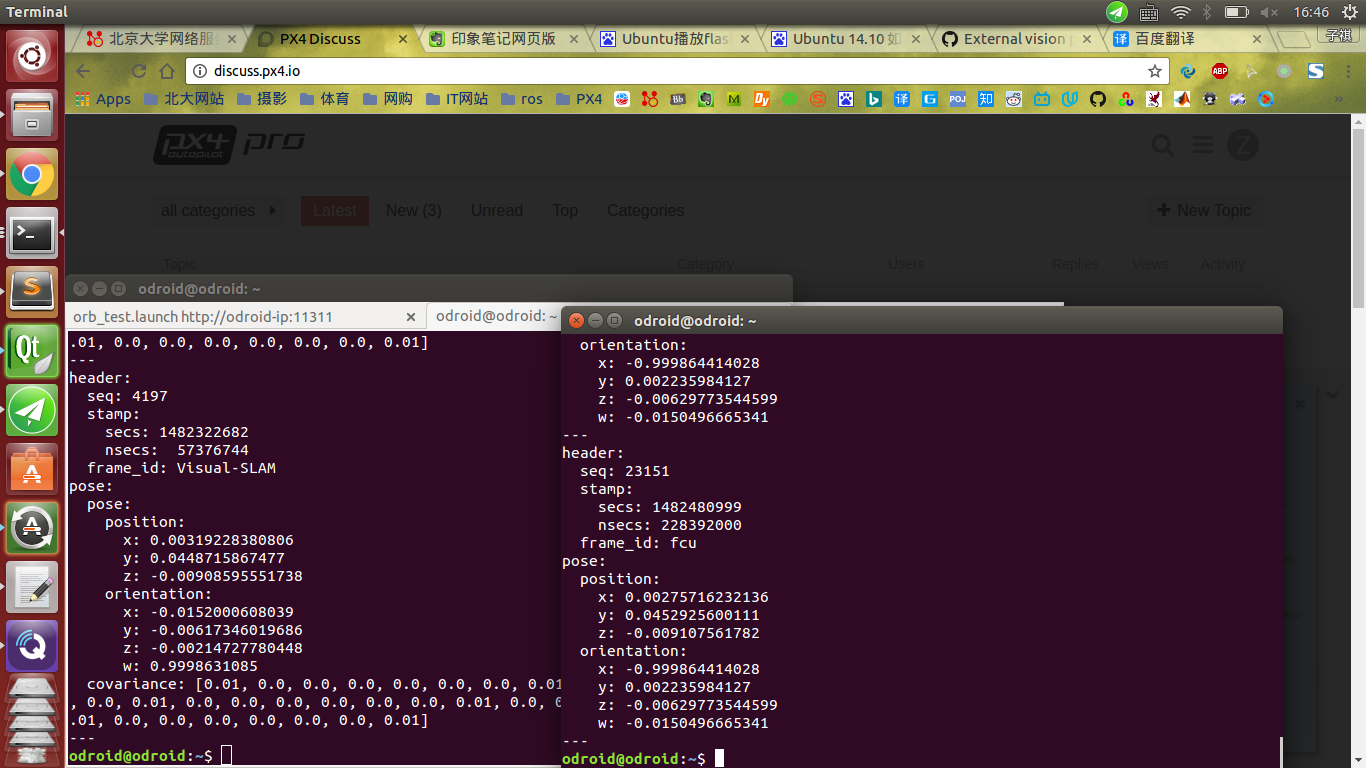
Now my position is accurate but the orientation of /mavros/local_position/pose is nothing about vision but all of NED.
This is my /mavros/local_position/pose output. As you can see the position is delightly the same with the input. But sadly the orientation is not. In euler form the quaternion is yaw=3.14(pi), roll=0, pitch=0, which follows the NED coordination.
Because now I’m not very understand the algorithm of the filter system and I feel my magnetic instrument have too much noise so firstly I want my drone to purely rely on SLAM output.
Did you analysis your log about the norm of Mag data?
You could use your vision coordinate but it should transfer into the ENU coordinate for MAVROS and MAVROS will transfer it to PX4 whose coordinate is NED.
I haven’t analyse the log
What I’m trying to do right now is transfer the coordinate. But is there any way that I can get rid of ENU coordinate and completely rely on vision coordinate?
Without the original onboard magnetic sensor, the vehicle might be dangers when the vision-based yaw angle data is not stable enough. You could test whether your sensors are well calibrated, then add the vision sensor into the filter with proper fusion weights.
Thank you very much… Without you I really don’t know how can I get more information about PX4. I am now reconfiguring my drone and want to add the vision sensor into LPE algorithm. But I can’t configure level horizon sensor as I asked herehttp://discuss.px4.io/t/level-horizon-calibration-always-fail/2024