Hi,
Thanks for reading this.
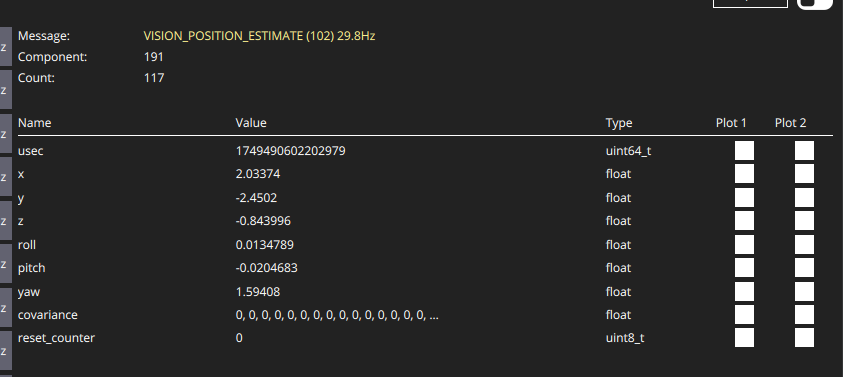
I am setting up the mocap system with PX4 for indoor flight without GPS. Now I wish to pass my mocap coordinates directly to the PX4 local position. However, I only see the VISION_POSITION_ESTIMATE work with my desired data, while LOCAL_POSITION_NED still only use the imu data.
Here are the things I did:
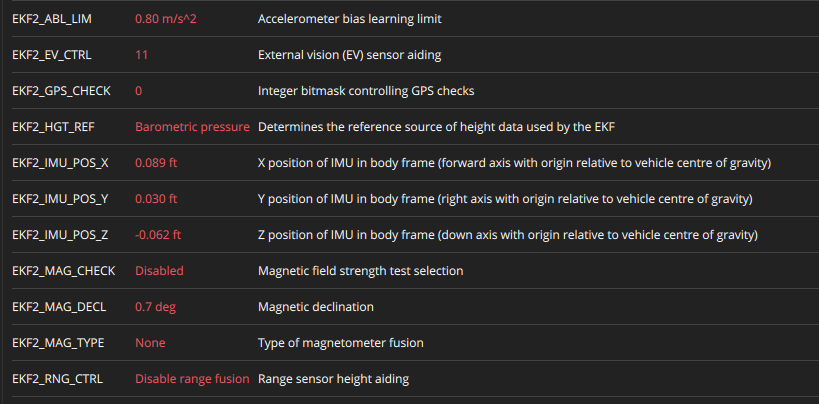
- change follow parameters for EKF2:
- write a ros2 code, pass the mocap data to /mavros/vision_pose/pose topic. My mocap data is in PoseStamped message.
- I did the transformation for frame vision_world and map. Basically just to make the vision_world locate at the same place and same orientation as the map frame.
Then I run the code. But in QGC, I could find following results:
Correct VISION_POSITION_ESTIMATION:
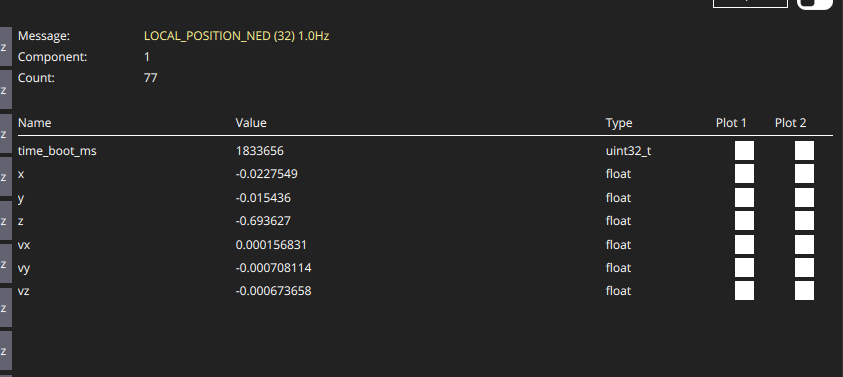
Wrong LOCAL_POSITION_NED:
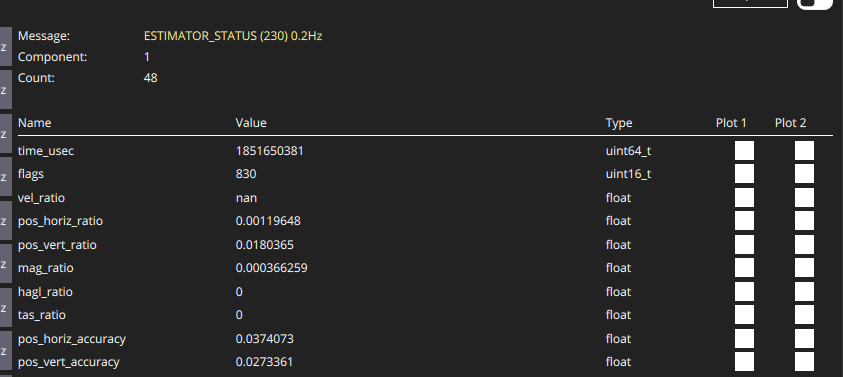
ESTIMATOR_STATUS:
For checking uORB topic:
listener vehicle_visual_odometry
TOPIC: vehicle_visual_odometry
vehicle_visual_odometry
timestamp: 1897628745 (0.002373 seconds ago)
timestamp_sample: 1897616192 (12553 us before timestamp)
position: [-0.02321, -0.01561, -0.05697]
q: [0.99980, -0.01720, -0.00253, -0.00962] (Roll: -2.0 deg, Pitch: -0.3 deg, Yaw: -1.1 deg)
velocity: [-0.00018, -0.00022, -0.00017]
angular_velocity: [0.00037, -0.00200, 0.00117]
position_variance: [0.00000, 0.00000, 0.00000]
orientation_variance: [0.00000, 0.00000, 0.00000]
velocity_variance: [0.00002, 0.00003, 0.00001]
pose_frame: 2
velocity_frame: 3
reset_counter: 1
quality: 34
TOPIC: estimator_status
estimator_status
timestamp: 1936384413 (0.002673 seconds ago)
timestamp_sample: 1936293115 (91298 us before timestamp)
control_mode_flags: 67138049 (0b100'0000'0000'0111'0010'0000'0001)
output_tracking_error: [0.00001, 0.00019, 0.00019]
filter_fault_flags: 0
pos_horiz_accuracy: 0.03818
pos_vert_accuracy: 0.02782
mag_test_ratio: 0.00032
vel_test_ratio: nan
pos_test_ratio: 0.00016
hgt_test_ratio: 0.02116
tas_test_ratio: 0.00000
hagl_test_ratio: 0.00000
beta_test_ratio: 0.00000
time_slip: -0.05459
accel_device_id: 2490378 (Type: 0x26, SPI:1 (0x00))
gyro_device_id: 2490378 (Type: 0x26, SPI:1 (0x00))
baro_device_id: 12018473 (Type: 0xB7, I2C:5 (0x63))
mag_device_id: 0 (Type: 0x00, UNKNOWN:0 (0x00))
gps_check_fail_flags: 0
innovation_check_flags: 0
solution_status_flags: 830 (0b11'0011'1110)
reset_count_vel_ne: 4
reset_count_vel_d: 1
reset_count_pos_ne: 98
reset_count_pod_d: 2
reset_count_quat: 186
pre_flt_fail_innov_heading: False
pre_flt_fail_innov_vel_horiz: False
pre_flt_fail_innov_vel_vert: False
pre_flt_fail_innov_height: False
pre_flt_fail_mag_field_disturbed: False
health_flags: 0
timeout_flags: 0
I feel it is really strange that the vehicle_visual_odometry topic echoes different data as the VISION_POSITION_ESTIMATION, but similar to the LOCAL_POSITION_NED. And I am really confused about why I could not pass the direct data to local_position_ned.
I will be really grateful if someone could help!
Best wishes