Hello everyone!
I have been running the iris_opt_flow model in SITL which differs from the regular iris model on the implementation of the px4flow.
I have tried the MAVSDK take off and land and offboard examples and similar results arise.
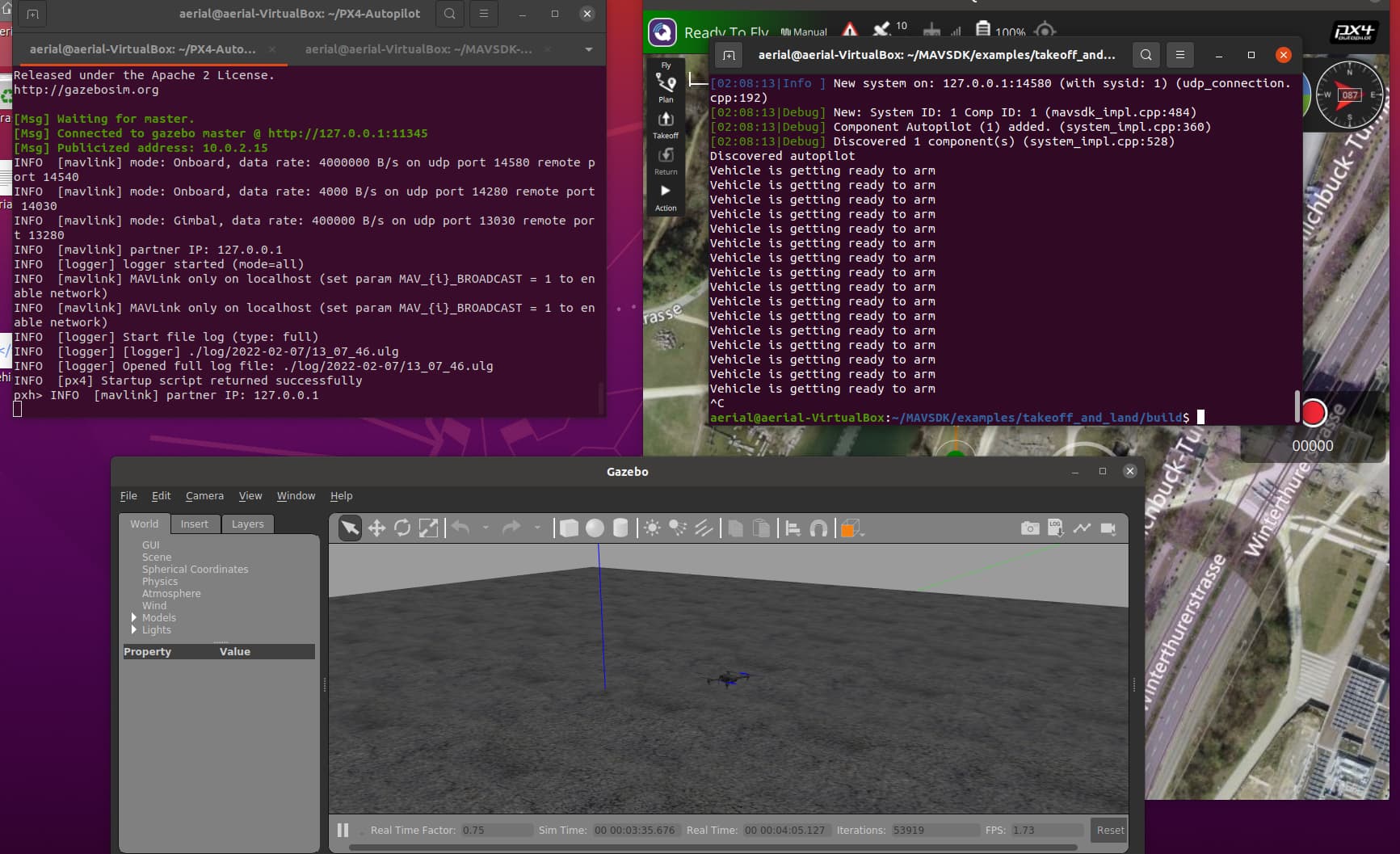
The takeoff and land example gets stuck in this loop:
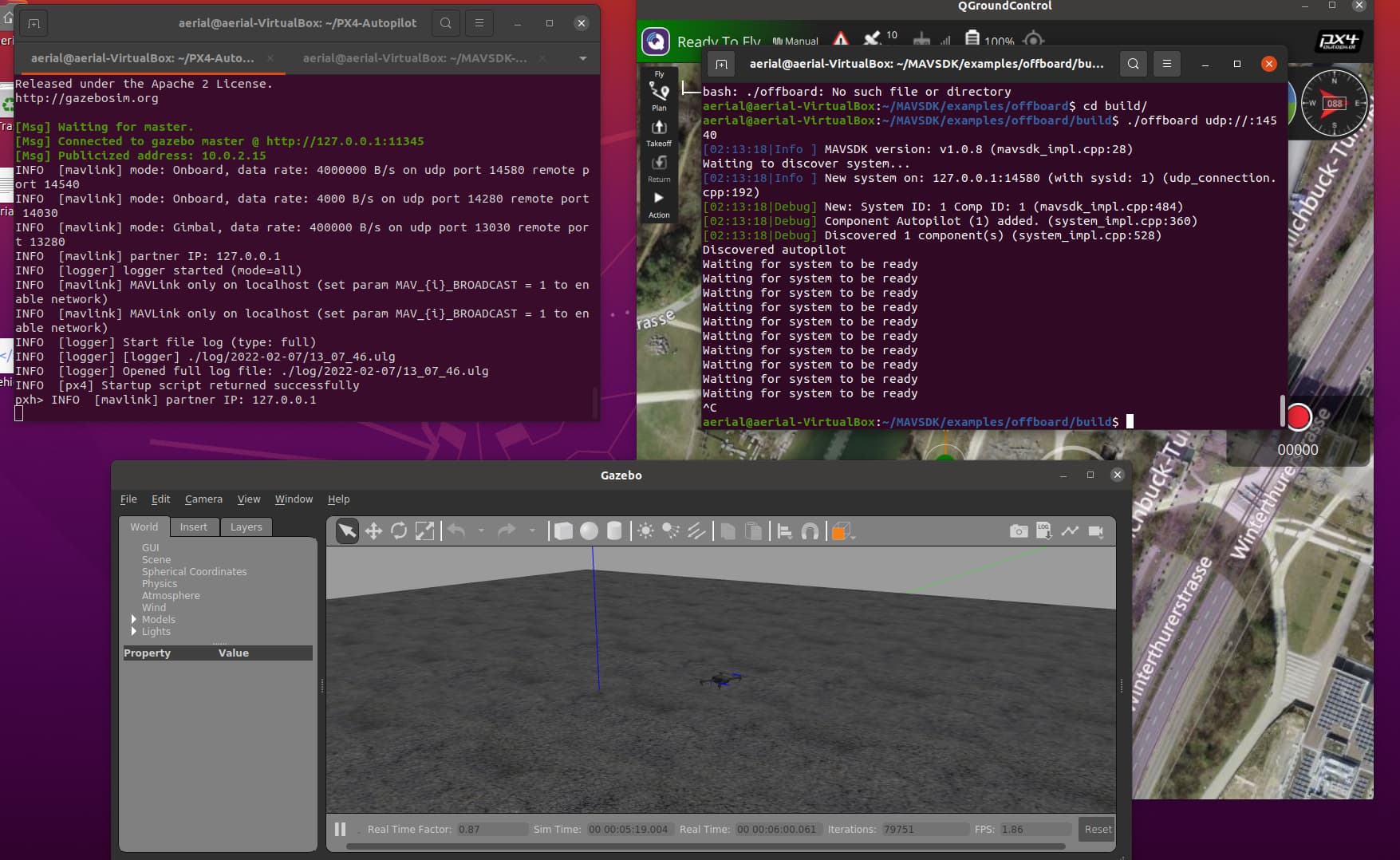
The offboard example gets stuck also:
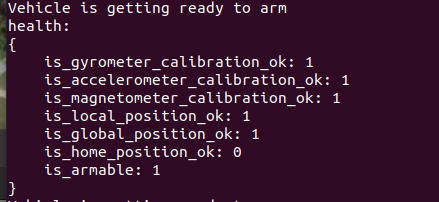
It appears that some preflight checks are not being passed by the model. Has anyone experienced such issue? Is there anything I can do to avoid it?
Thanks!