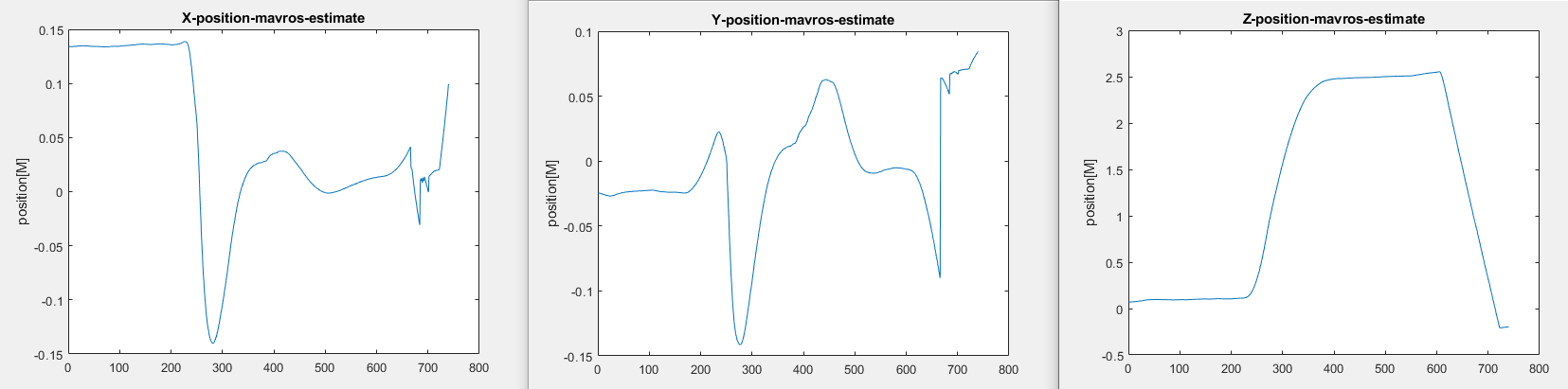
So I’m trying to fly the drone using only optical flow (EKF2_AID_MASK = 2 in qgroundcontrol). The first time i try to use commander takeoff it throws a failsafe no manual control stick input, even when having ground control open, the second time i use commander takeoff (same make) it starts flying for around 10 seconds and then lands saying invalid set_points and no local position. I don’t understand why it says no local position because when i use record the topic /mavros/local_position/odom and plot it in matlab i can see it does have an estimated position of the drone. The error occurs when the Z-position starts rapidly dropping.Furthermore I can only get it to fly using the built in commander takeoff function, when switching the drone to offboard mode and and asking it go to to a specific location nothing happens at all, the drone just stays on the groundDo you have any ideas because I really don’t know why it is happening.
Steps to reproduce:
- Install PX4-autopilot, ros-melodic, mavros, qgroundcontrol
2. cd PX4-autopilot
3. make px4_sitl gazebo_iris_opt_flow
Expected result:
The drone flies using optical flow due to EKF_AID_MASK = 2Observed result:
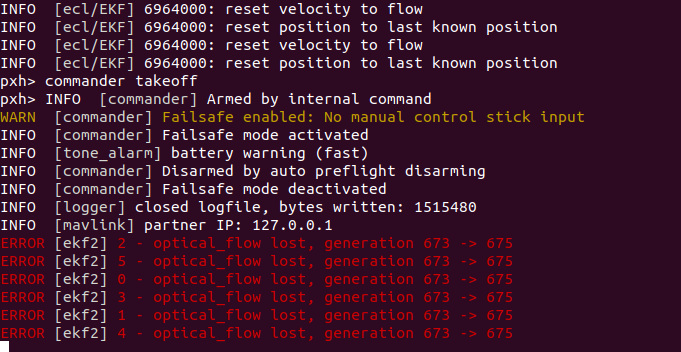
Using commander takeoff the first time
WARN [commander] Failsafe enabled: No manual control stick input
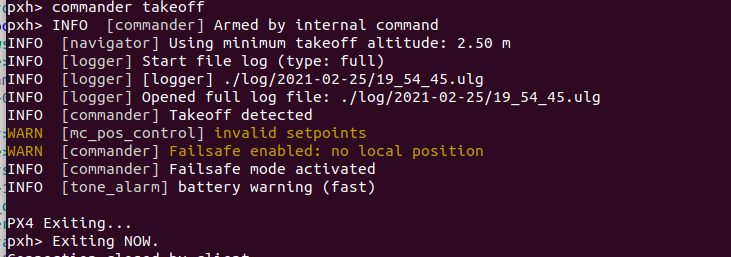
Using commander takeoff again in the same simulation
Drones flies for 5-10 seconds then gives the errors
WARN [commander] Failsafe enabled: No local position