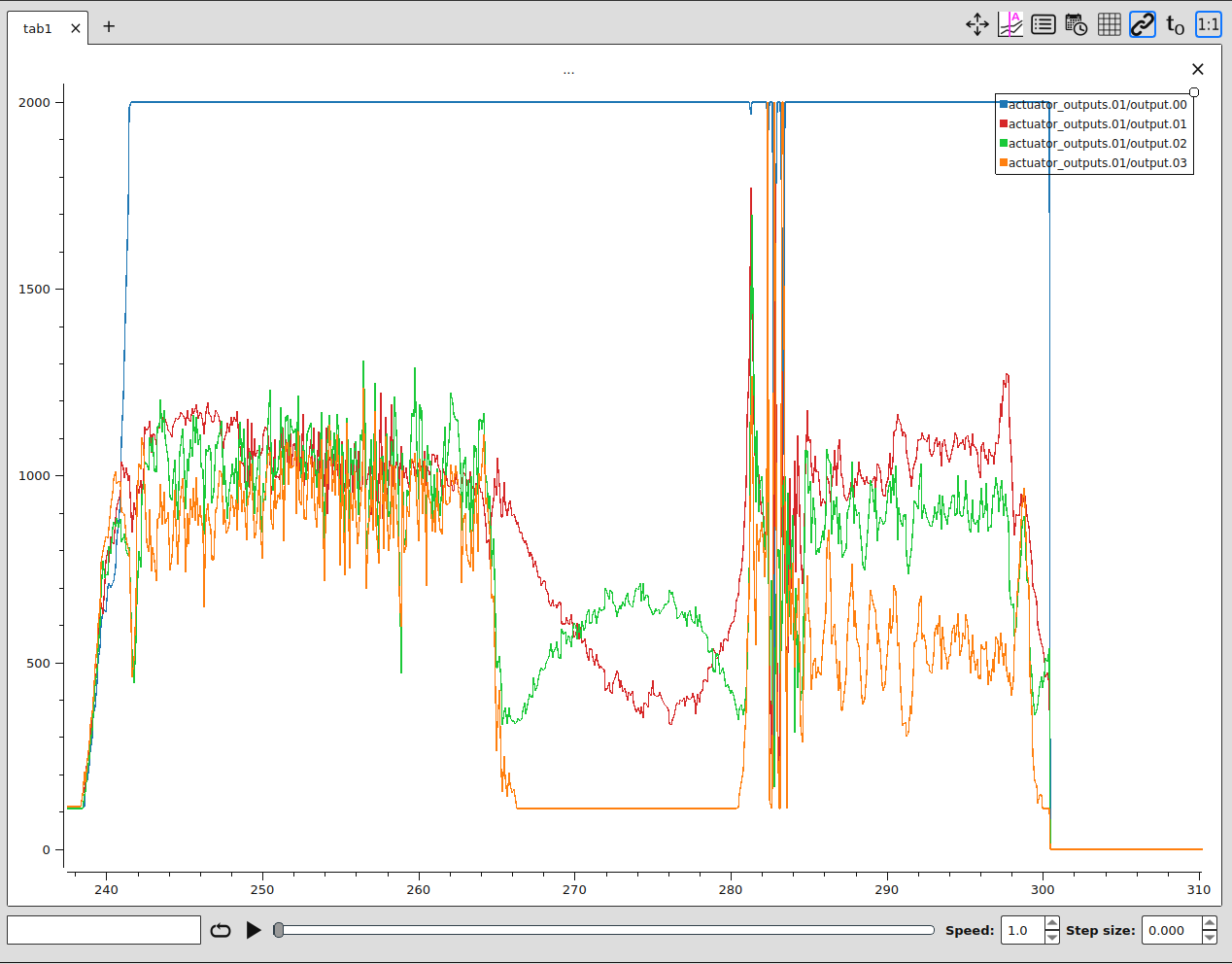
Something is wrong with Motor 1. The flight controller is commanding full throttle on that motor yet it is not spinning up. As you can see in the video the vehicle tilts towards motor 1. If the ESCs support dshot telemetry you should hook it up. I would test each motor through the full range (0 to 100 throttle) to validate the ESC/motor works through the full output range. You could also flash Ardupilot and use ESC passthrough to check the ESC firmware settings using BLHeli Configurator / AM32 Configurator (depending on which ESC FW you’re running). It might be the case that the ESC on Motor1 is misconfigured, either wrong KV/pole settings or otherwise.
dakejahl
11
Related topics
| Topic | Replies | Views | Activity | |
|---|---|---|---|---|
| Tekko32 AM32 ESCs | Throttle Issues | 5 | 857 | November 28, 2024 | |
| S500 has propellers spinning but doesn't take off | 15 | 173 | June 11, 2025 | |
| First Test Flight of Holybro X650 - Drone Did Not Take Off | 10 | 897 | December 11, 2024 | |
| Holybro X650 kit Did Not Take Off | 4 | 377 | July 9, 2025 | |
| Pixwhawk -> ESC -> Motors Don't spin enough for Takeoff | 9 | 96 | April 3, 2026 |