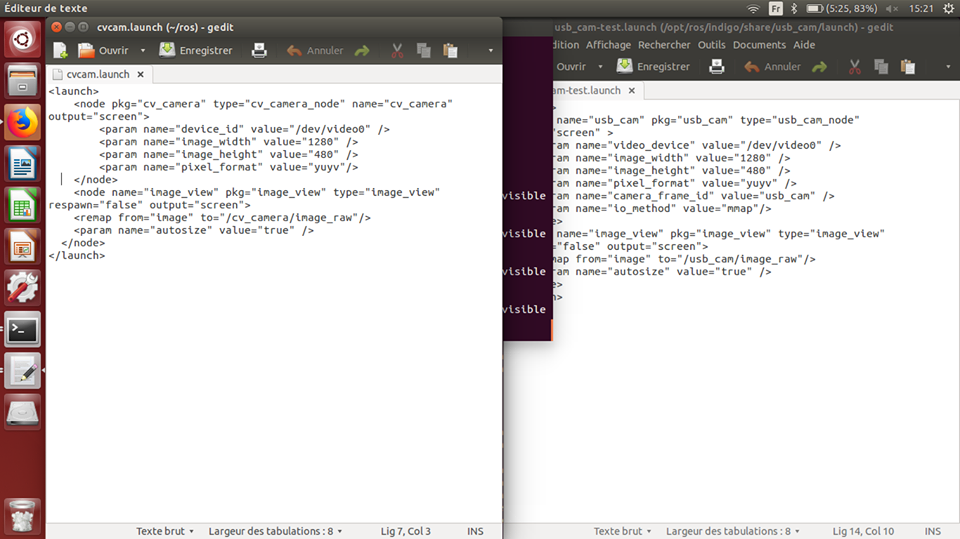
If you want to open a flow visualization interface from your camera, add the following lines to your .launch file.
You can also use “rqt” to visualise the flow of your camera.
ROS Packages We used
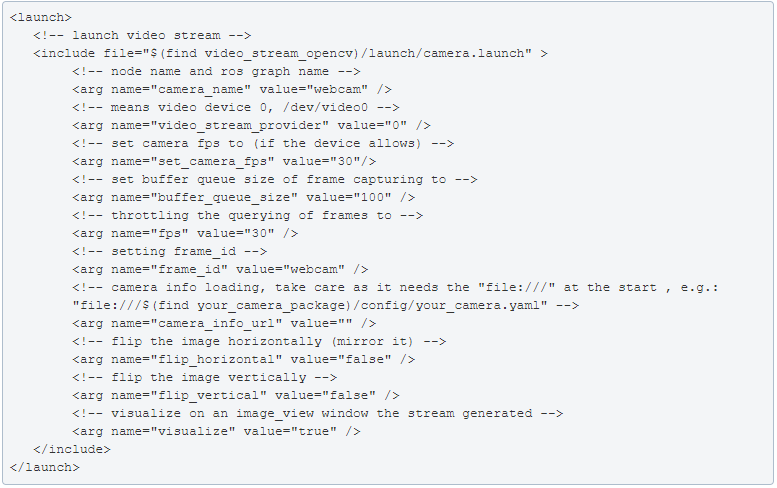
- Video_stream_opencv
video_stream_opencv - ROS Wiki (Make sure to carefully read the page)
The video_stream_opencv package contains a node to publish a video stream (the protocols that opencv supports are supported, including rtsp, webcams on /dev/video and video files) in ROS image topics, it supports camera info and basic image flipping (horizontal, vertical or both) capabilities, also adjusting publishing rate. The topic created will then be used as a parameter of the lsd_slam node.
- Camera_calibration
http://wiki.ros.org/camera_calibration (Make sure to carefully read the page)
camera_calibration allows easy calibration of monocular or stereo cameras using a checkerboard calibration target.
Installation of ROS (Raspberry PI 3)
We installed ROS on our raspberry in order to be able to communicate with my USB camera via Raspberry wifi module.
To install ROS on our raspberry we followed the following tutorial:
http://wiki.ros.org/ROSberryPi/Installing%20ROS%20Kinetic%20on%20the%20Raspberry%20Pi
In this tutorial, two different ways are presented to install ROS on your raspberry:
- Download an image that directly contains the installation of ROS
- Download an image that does not contain ROS and install it via command lines
For our part we preferred to follow the first method because it seemed faster.
Here are the steps we took.
Step 1: Download the image file for my raspberry
We downloaded the image file from the site below by selecting the latest version posted:
https://downloads.ubiquityrobotics.com/pi.html
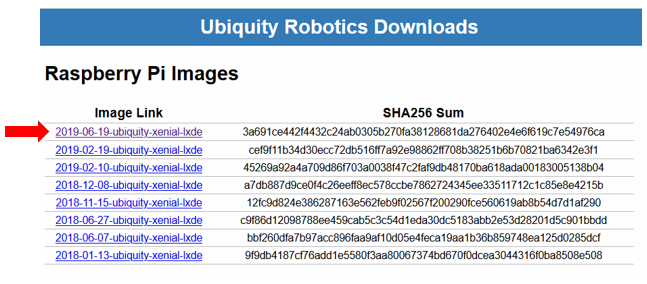
This web page is accompanied by a description of the image that is provided.
Step 2: Format the SD card
The SD card on which the image have to be installed must first be formatted. We used the “SD Card Formatter” software which can be downloaded at the following internet address: SD Card Formatter pour Windows - Télécharge-le gratuitement à partir d'Uptodown
Once the software has been downloaded, you come across the following interface:
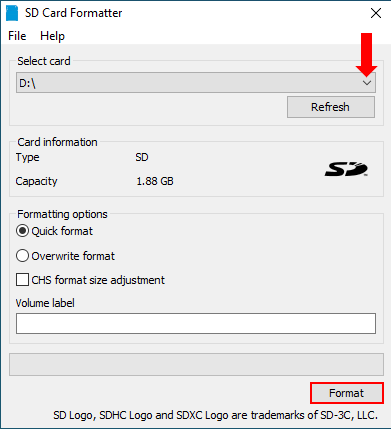
Now just select your SD card in the “Select card” tab then click on the “Format” button and wait for the “Volume labe” bar to be completely green.