Step 3: Flash the image on the SD card
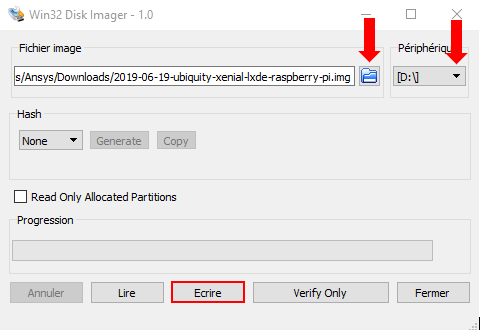
To flash the image on the SD card, you need to download a free software that you can easily find on the internet. So we used the software “Win32DiskImager” which we downloaded via the following link: Télécharger Win32 Disk Imager (gratuit) Windows - Clubic
The image that we have downloaded needs to use an SD card of 16 GB at least.
When you open the application you must select the image that you downloaded in step 1 in the “Image file” tab. Then you must select your SD card in the “Device” tab. It remains only to click on the “Write” button and wait until the “Volume label” has finished filling up.
Step 4: Use your raspberry
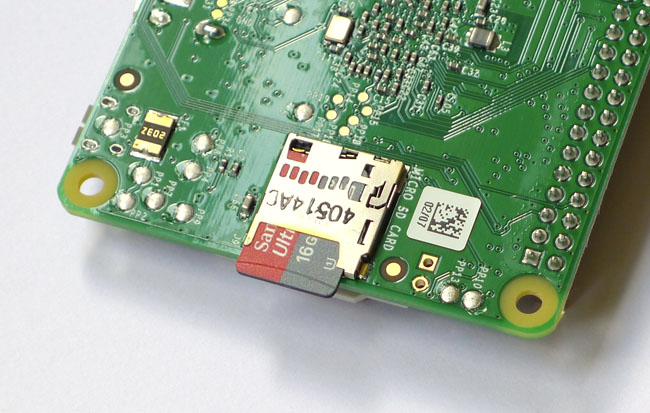
You can now insert your SD card into the slot of your raspberry.
Now just connect your raspberry to a computer screen via an HDMI cable and power your raspberry.
Once connected to the internet we advise you to launch the following commands:
- sudo apt update
- sudo apt upgrade
These commands may take a few minutes to execute.
In addition, if you want to change the keyboard configuration (which is in English), you will have to use the following command lines:
- For the active session : setxkbmap fr or sudo loadkeys fr
Definitely : sudo dpkg-reconfigure keyboard-configuration
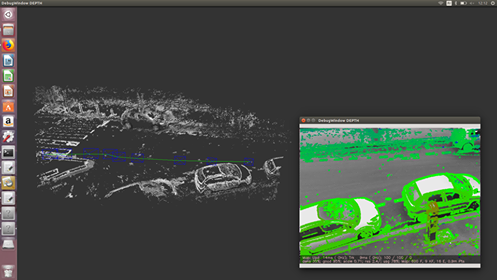
Installation of LSD-SLAM
We installed LSD-SLAM (Large-Scale Direct Monocular SLAM) on Ubuntu 14.04 in order to get an environmental mapping.
To install LSD-SLAM on our computer we followed the following tutorial:
https://github.com/tum-vision/lsd_slam
First, go to the title “2.Installation” and choose the tutorial that corresponds to the version of your ubuntu (ROS fuerte + Ubuntu 12.04 or ROS indigo + Ubuntu 14.04).
We have followed the 2.2 method. You must pay attention to what is written in the tutorial. For example, if you have already created a rosbuild workspace, don’t create another one !!!
If you have error messages that appear in the terminal, we advise you to go to the github tab “Issues”. It’s very useful.

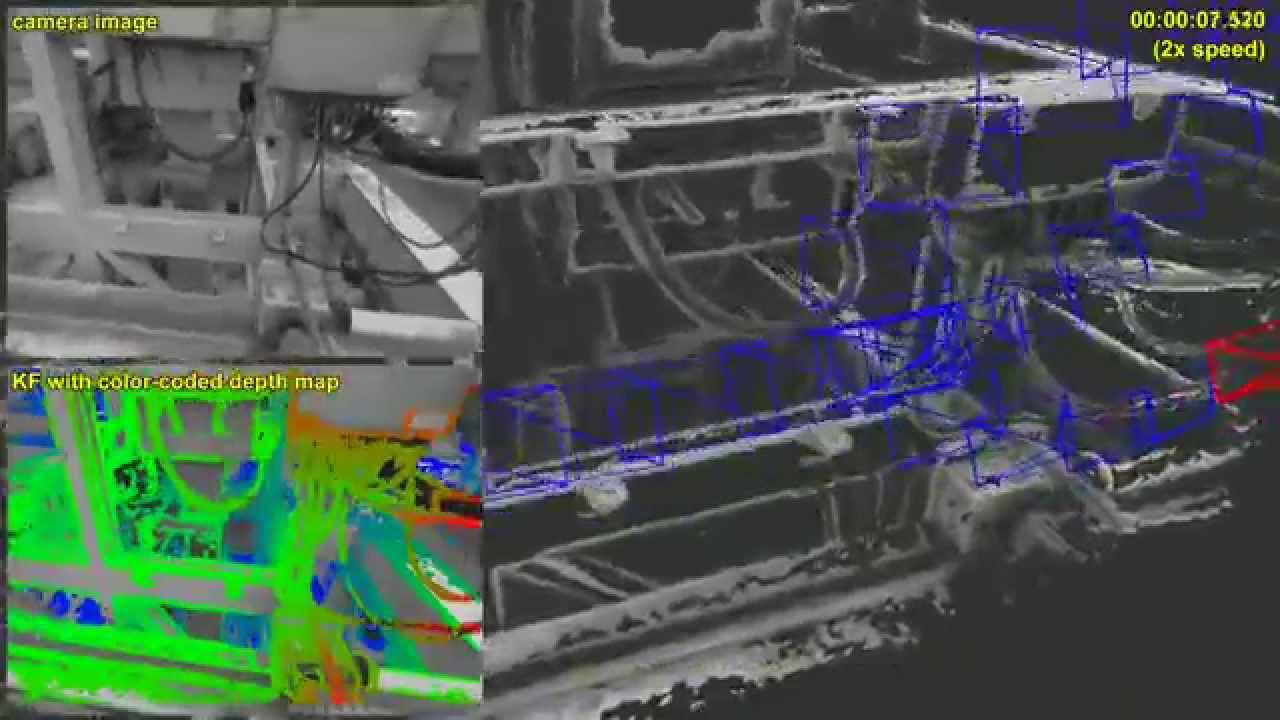
How to use LSD-SLAM ?
To obtain a map of the environment filmed by our camera, you must run the following commands:
- rosrun lsd_slam_viewer viewer
if you want to use live_slam:
- rosrun lsd_slam_core live_slam /image:= /camera_info:=<yourcamera_infotopic> *
*you can find the topic information in writting “rostopic list” in the terminal
if you want to use dataset_slam:
- rosrun lsd_slam_core dataset_slam _files:= _hz:=0 _calib:=<calibration_file>
is the framerate at which the images are processed