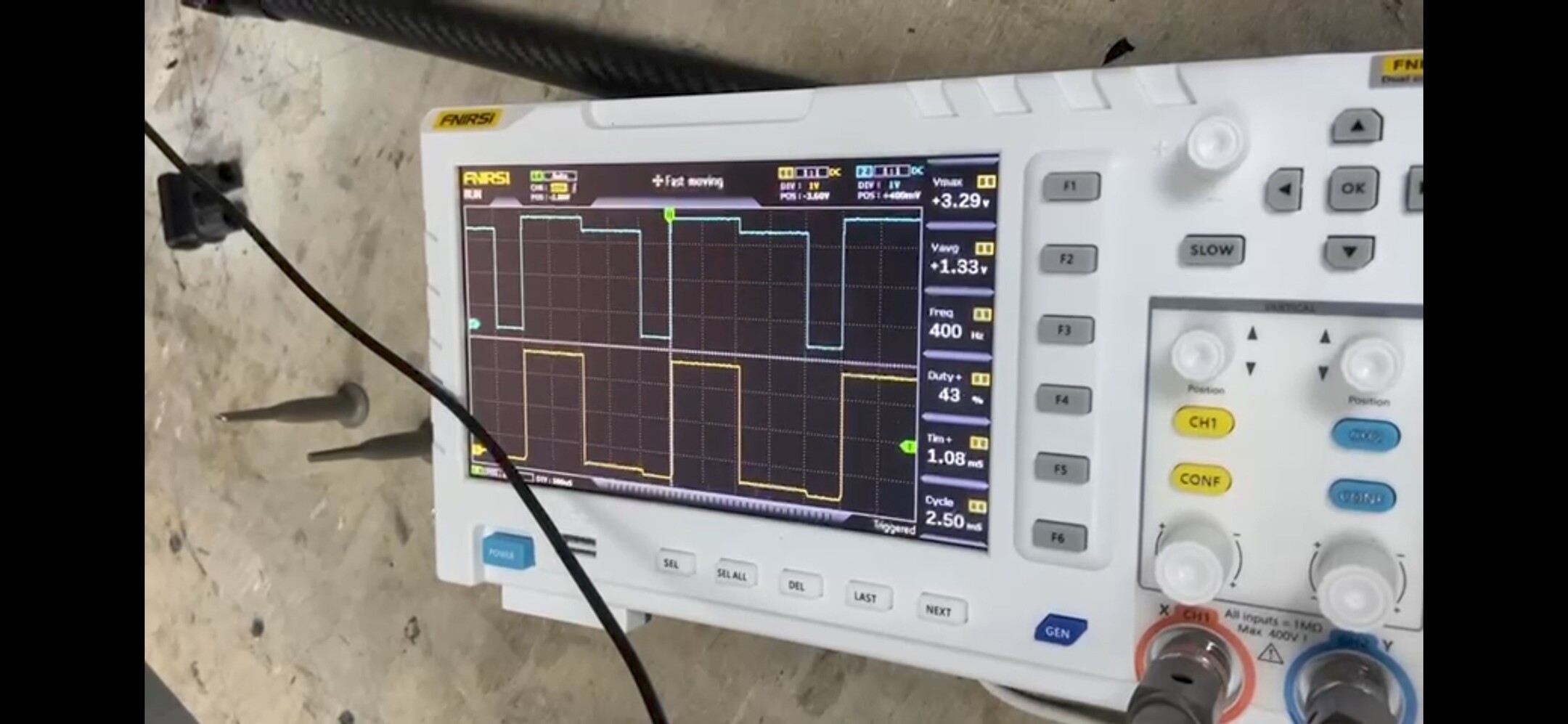
Good afternoon, I am building a quadcopter using pixhawk 6C. Faced a problem with ESC. When controlling only one motor with a propeller installed on it through qgroundcontrol, I open the throttle by 80-100%, incomprehensible motor beats occur and it does not spin up to maximum speed. If I start all the motors at the same time, then there is no beat and the motors spin up to the maximum. Using an oscilloscope, I checked the PWM signals at the output of the autopilot and saw the following picture: when the throttle is opened simultaneously for all motors, the signal is normal, and when trying to start one of the motors, or when trying to maneuver the quadcopter, a very strange signal occurs. In the first picture, the moment of maximum throttle of all motors and the signal has a normal form for PWM. In the second picture, the moment of trying to turn the quadcopter around its axis using the radio remote control and the signals going to neighboring motors. I tried to change the autopilot firmware, the signal frequencies too, it did not help. Can you please tell me what could be the cause of this situation and how it can be solved?

That’s odd. What PX4 version are you using? Latest stable, so v1.13 I assume?
Used firmware version v1.13.0 beta which was installed on autopilot. Updated the firmware to the latest V1.13.2. The problem hasn’t been resolved. I also checked the output signals directly in the connector of the autopilot itself, the picture is the same, respectively, the problem seems to be in the autopilot board itself.