Dear all, @JulianOes, @bresch, @sfuhrer, @rroche, @mohammad
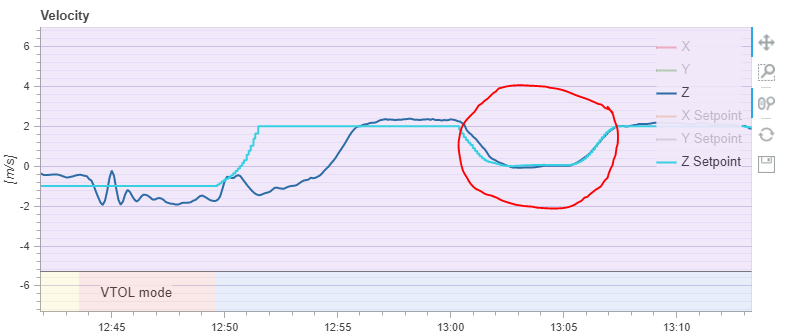
Quite often, I observe that the aircraft pauses descending close to the VTOL Land WP before it starts descending for landing. Any idea how I can make it descend without pause once the back transition ends and it is in multi-rotor mode?
I found a code piece at mission.cpp as following. I think it is happening somewhere here.
/*
* Ignoring waypoint altitude:
* Set altitude to the same as we have now to prevent descending too fast into
* the ground. Actual landing will descend anyway until it touches down.
* XXX: We might want to change that at some point if it is clear to the user
* what the altitude means on this waypoint type.
*/
float altitude = _navigator->get_global_position()->alt;
if (pos_sp_triplet->current.valid
&& pos_sp_triplet->current.type == position_setpoint_s::SETPOINT_TYPE_POSITION) {
altitude = pos_sp_triplet->current.alt;
}
_mission_item.altitude = altitude;
_mission_item.altitude_is_relative = false;
_mission_item.nav_cmd = NAV_CMD_WAYPOINT;
_mission_item.autocontinue = true;
_mission_item.time_inside = 0.0f;
Kind regards!