Hey there,
I’ve a problem with my quadcopter. I’m flying a pathplan where the copter it flies 10m forth and back.
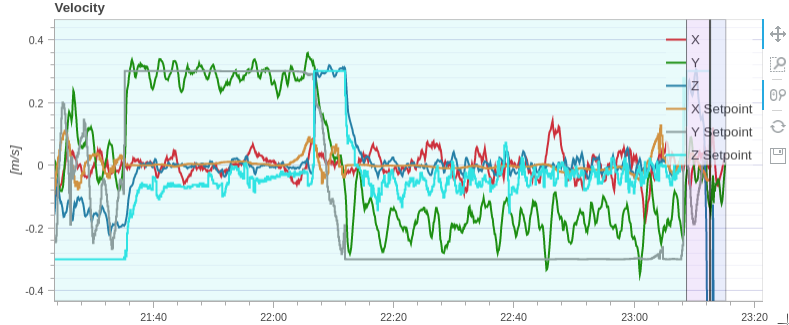
However it does not really control the velocity correct. It should fly with 0,3m/s. But as on the plot, it cant really control the velocity. when it flies backwards, it takes ages to come home. it does not reach the 0,3m/s.
is this just a controller tuning matter, but why does it only affect the backwards fly?
Please see the attached Plot, it is the y axis where the problem does occour:
thanks and best regards
Lisa