Hey there,
I’ve just tested my multicopter with stereo vision and it works ok but I’ve problems understanding the log files. I hope someone can help me to understand why in the log file local position x and y are swaped:
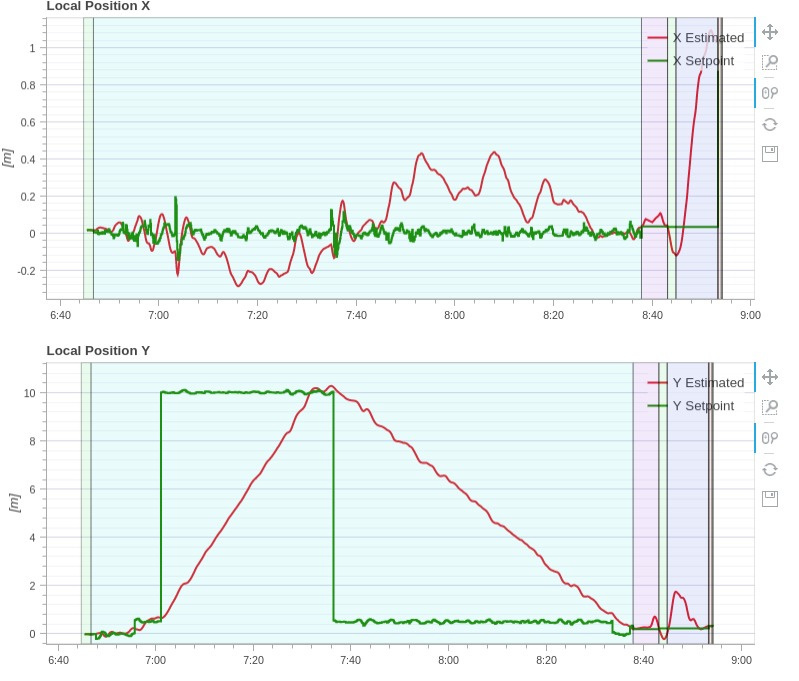
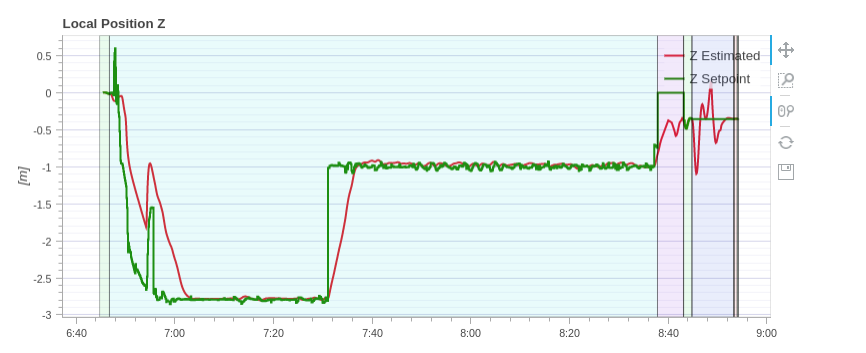
basicly the two plots are ok. but in real life, the copter has flow 10m in X and stays 0 on Y. In the log it is just the other way. however the copter flew in the right direction. this doesnt male sens to me at all.
the second thing is, maybe this two errors are related, the copter does not reach the overground speed when it flys backwards. in the velocity plot this is the y axis and as you can see it will not reach the setpoint:

any idea why it does not reach the velocity when it flys backwards? (forward is working)
thanks and best regards
Lisa