Hello,
I’m going to connect two LiDARs to Pixhawk 4
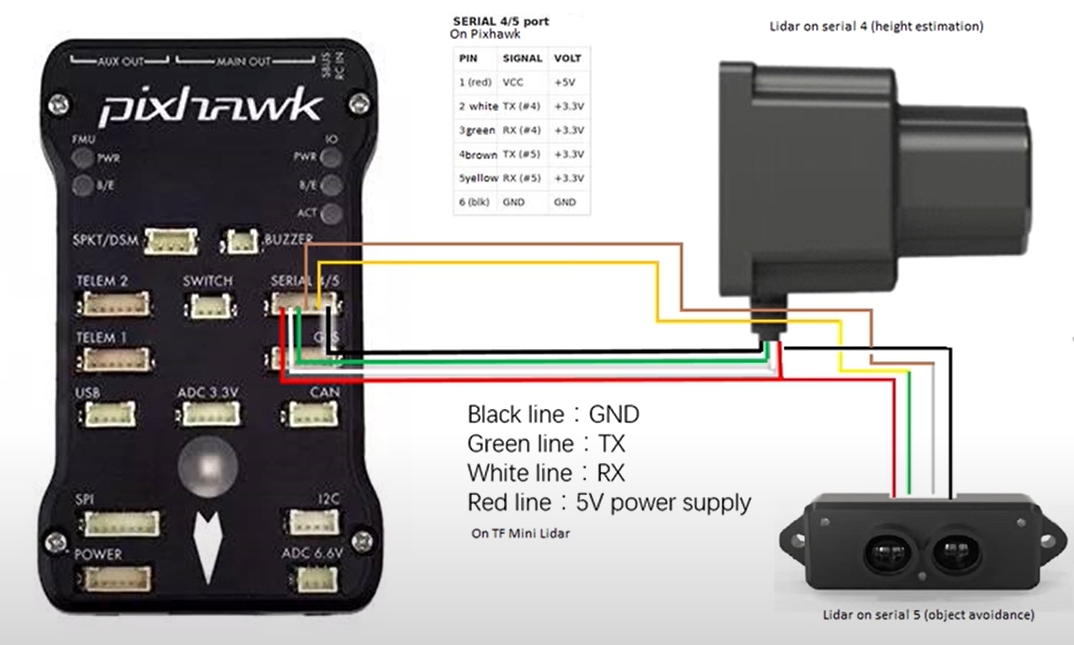
- TF02-Pro 40m : to meager the Hight of the drone
- TFmini Plus : to measure the distance of the objects in front of the drone
How I can connect them both to Pixhawk 4 and what parameters I have to change ?
I found this connection, in which port on Pixhawk 4 I can connect them ?
And what parameters I have to change ?
The best would be to connect via CAN port as CAN can accept many CAN devices in parallel
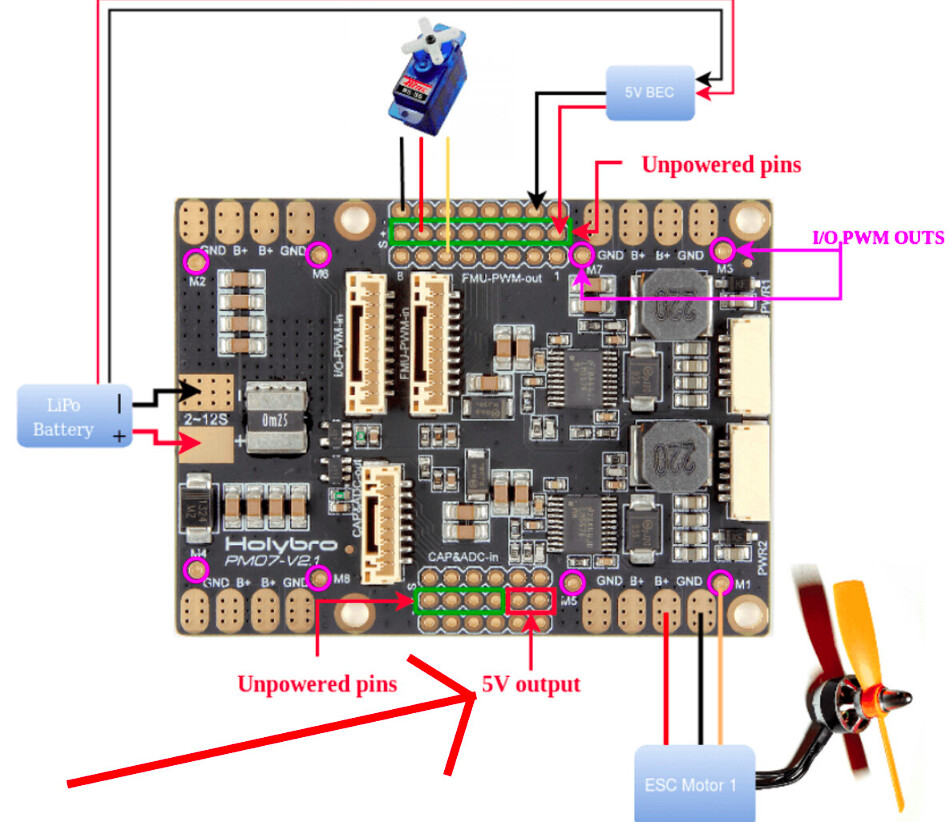
Use an independent supply for +5 (red/black).
@sibujacob
The best would be to connect via CAN port as CAN can accept many CAN devices in parallel
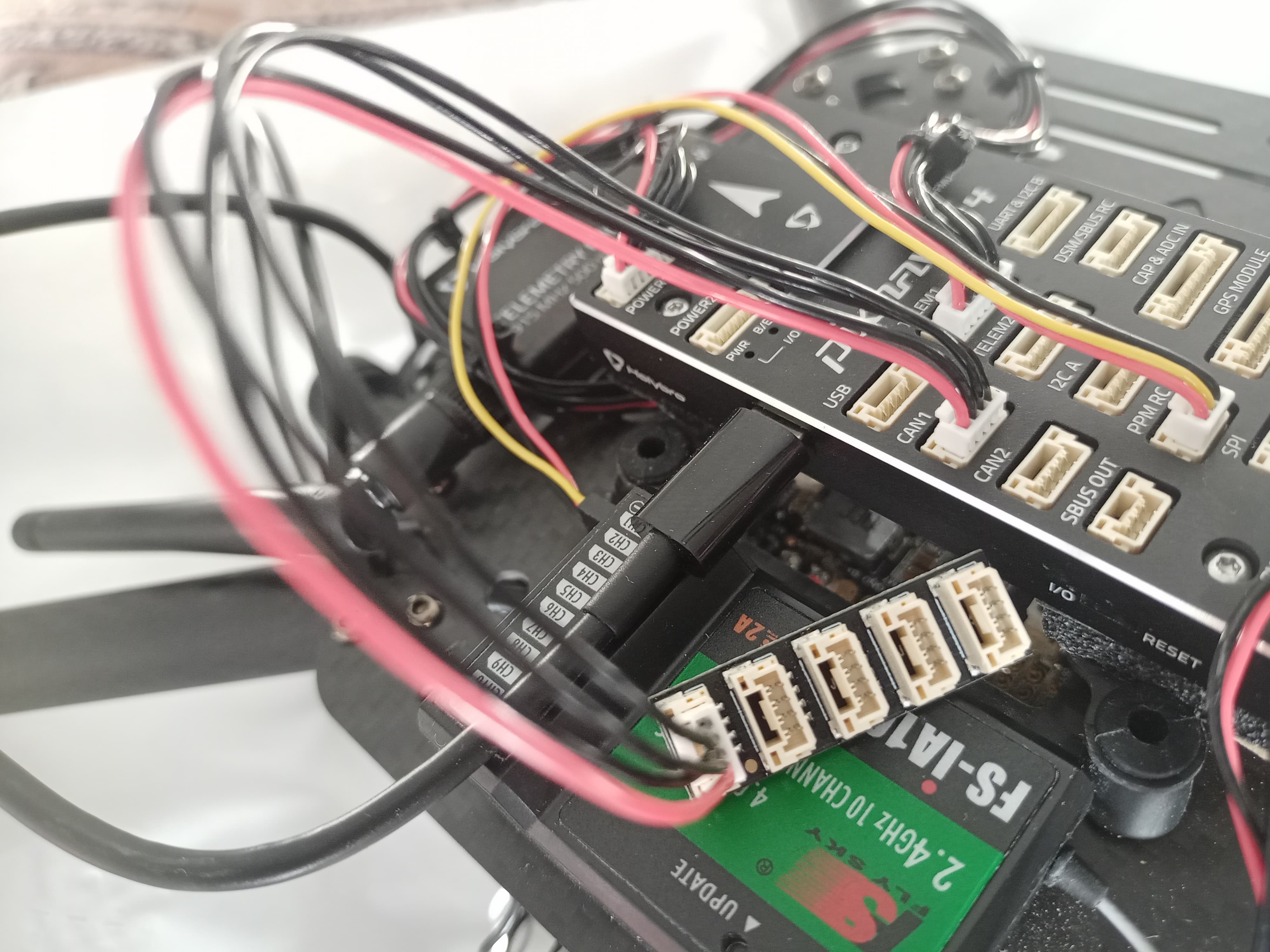
Do you mean like that ? is it a correct wiring ?
Do you mean like connecting it on CAP&ADC IN ?
Better independent external to make sure you don’t get supply from any tiny regulator inside the FC.
@Webillo
Better independent external to make sure you don’t get supply from any tiny regulator inside the FC.
Ok thanks, what about the drivers ?
Are there drivers for these sensors ?
if you want use tf mini as CAN periph you need a node for convert it from UART to CAN or an I2C to CAN