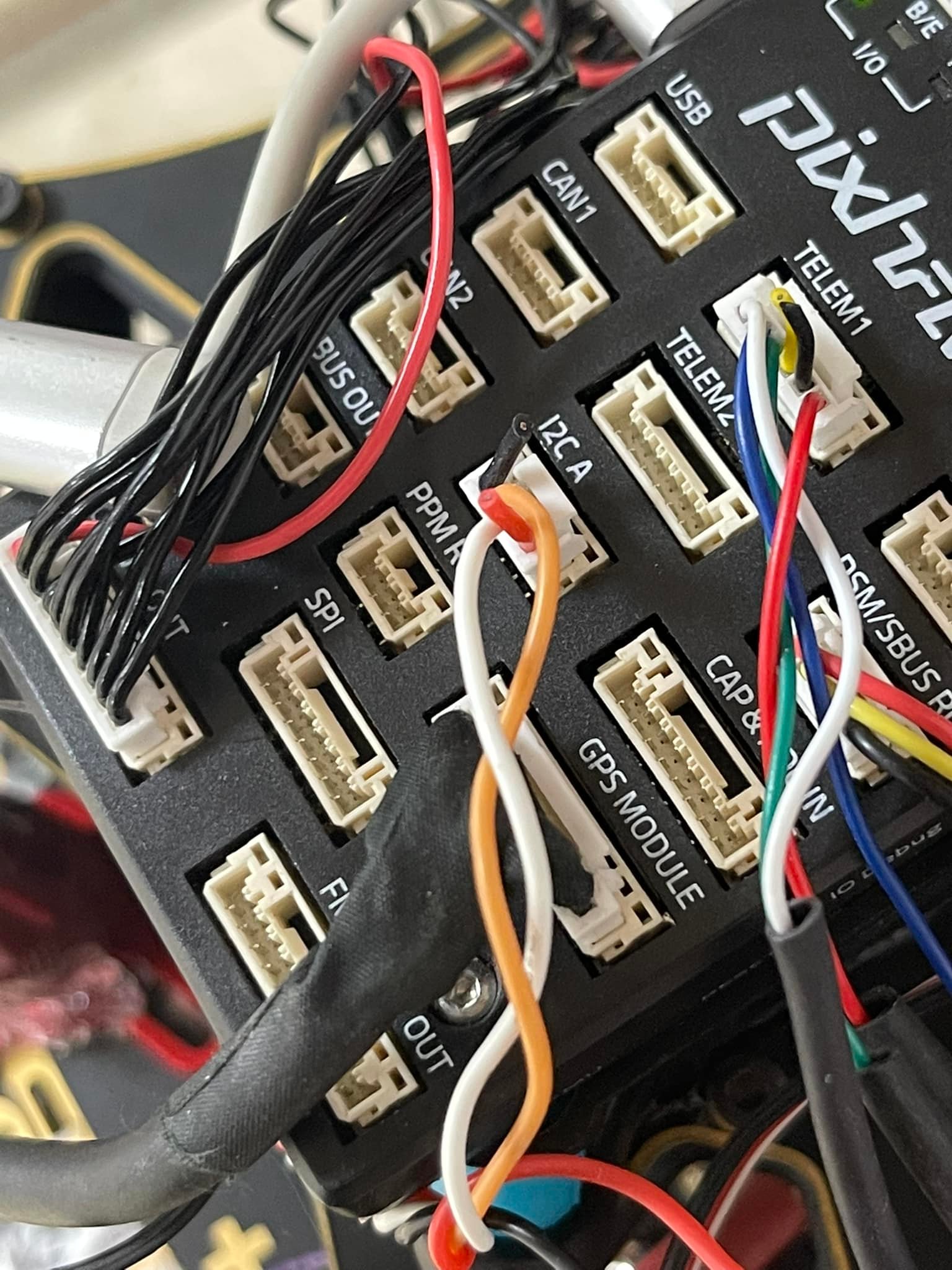
I recently started using PX4 (Using a Pixhawk 1 board with PX4FMU-v3). I got both a PX4FLOW and TFMINI sensor. While I am able to make each of them work individually, but not together. The PX4FLOW is connected on the i2c bridge while the TFMINI is connected to the SERIAL 4/5 port. I have a few hypothesis why this might be happening
PX4FLOW only works with LIDARs connected to i2c ports
PX4FLOW driver only has support for certain LIDARs
Figured out what was not working. The PX4FLOW starts first and takes precedence as the range finder. If I disconnect PX4FLOW and load with TFMINI first, followed by connecting PX4FLOW and starting the driver manually I can get both to work together. When I start the PX4FLOW manually I get a message warning me that PX4FLOW is not the rangefinder.
I want to automate this boot sequence. Is there a way by which I make TFMINI driver start before the PX4FLOW driver on my PIXHAWK? Right not the sequence is PX4FLOW first, and the LIDAR I have to start using extras.txt on my SD CARD.
I also use TFmini plus and PX4FLOW and I have the same problem
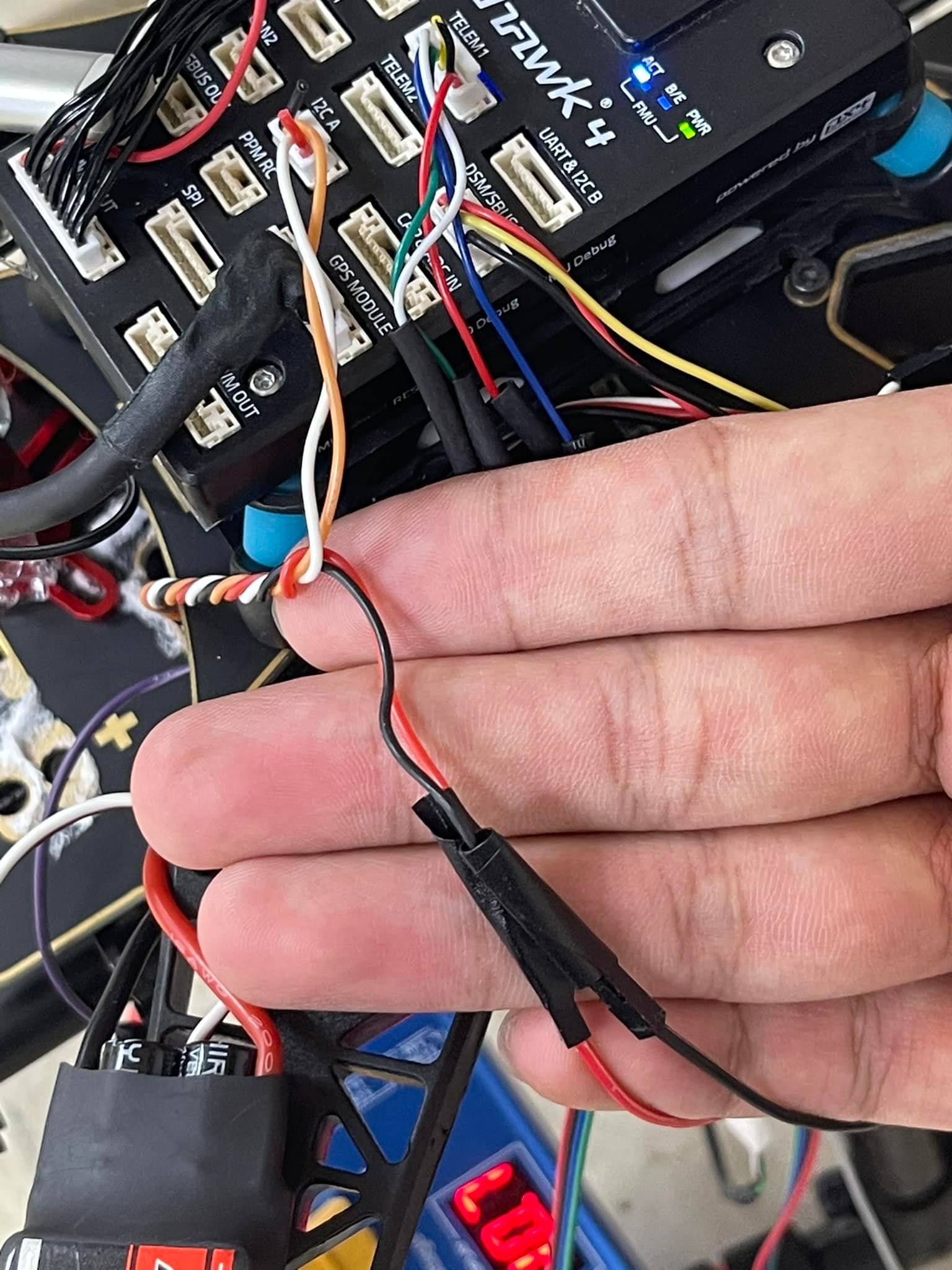
Using a Pixhawk 4 FMU-v5.
I found two problems
The firse problem is IIC underpowered.
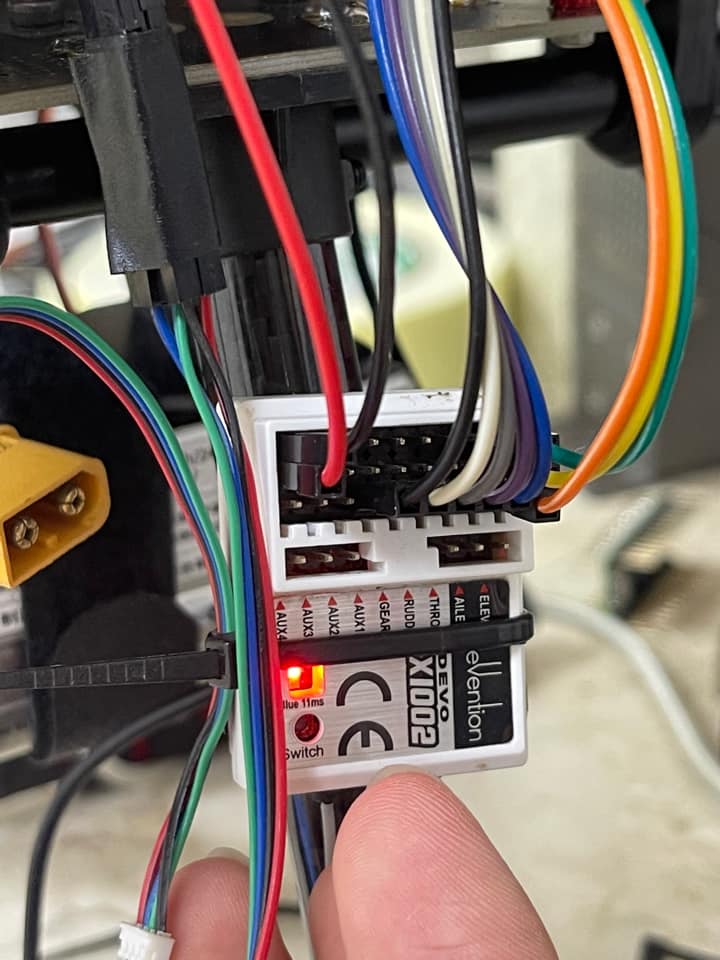
So i cut Vcc and GND connected to my RX1002 and is LED work.
But it didn’t work on QGC so i found the second problem. IIC cable is different so i change orange and white line and px4flow finally show on the QGC!