I’m currently trying to connect a Gimbal to a Pixhawk 6c. So far, I’ve been unable to operate it via remote or through MAVSDK. I managed to work this Gimbal on AUX PWM channel 1 of a Pixhawk 2.4.6 with Ardupilot once. But to be honest, I have no idea what I’m doing here. Does anybody have any pointers to get me started?
The Gimbal is a Tl3t05 by Tarot, the wiring diagram can be found in the manual on page 6.
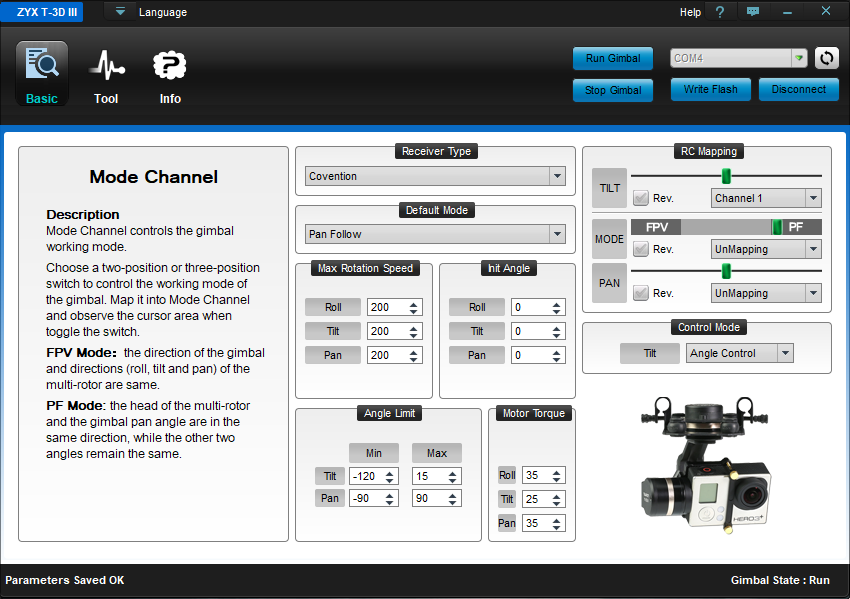
I connected FMU_CH1 and GND of port FMU PWM Out on the Pixhawk to CH1 and GND of the gimbal. My parameters can be found here. My gimbal has the following configuration, using Tarot’s software:
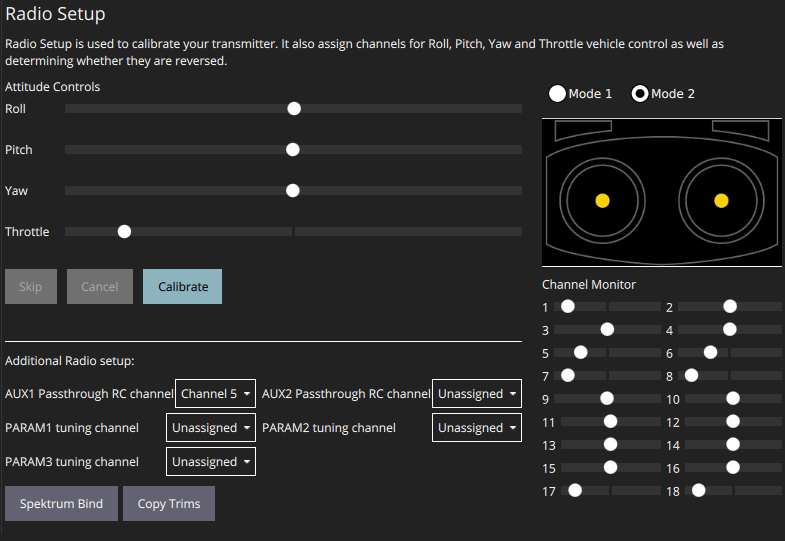
Channel 5 on my remote, which should be used to set the gimbal pitch, Is configured and responds in the Radio Setup of QGroundControl.
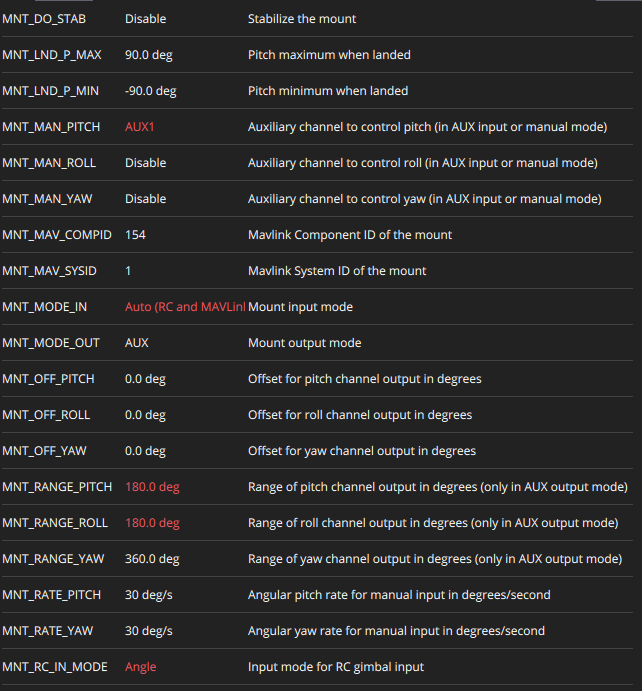
And a quick overview of the relevant mount parameters: