Hi, I can’t figure out how to run the CompasMot calibration - Compasss Motor Interference Calibration. Instructions are pretty clear, but doesn’t go into detail about MAVLink method, safety switch or throttle arming. I’ve tried several combinations of each, but no luck.
I’m connected via USB. With safety switch off, motor does not spin. with it on and vehicle disarmed, motor doesn’t spin. With vehicle armed, motor spins, but QGroundcontrol says “disabled wile vehicle is armed”.
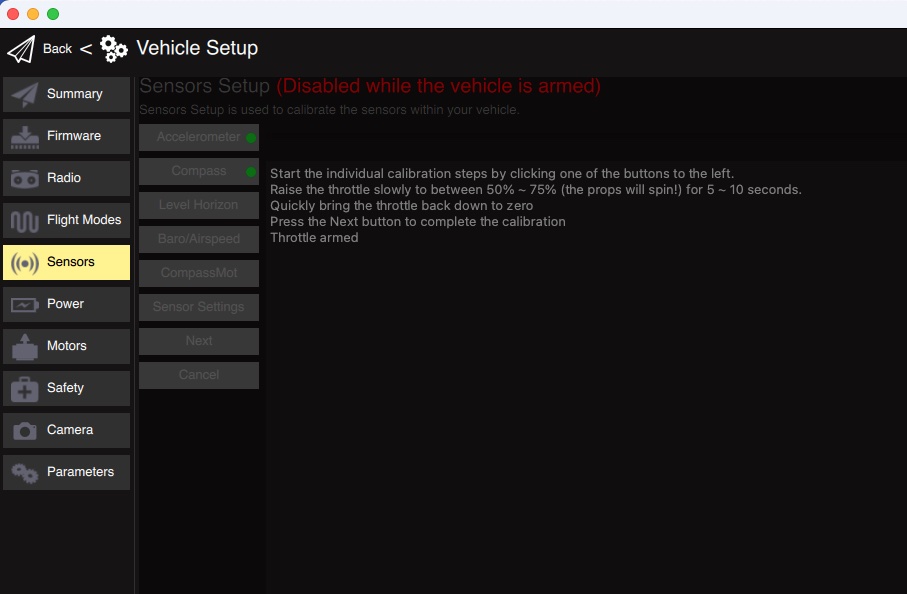
How do I do the motor to calibrate the motor compass interference if I have to be armed to spin the motor, but disarmed to run the test?