Hello everyone,
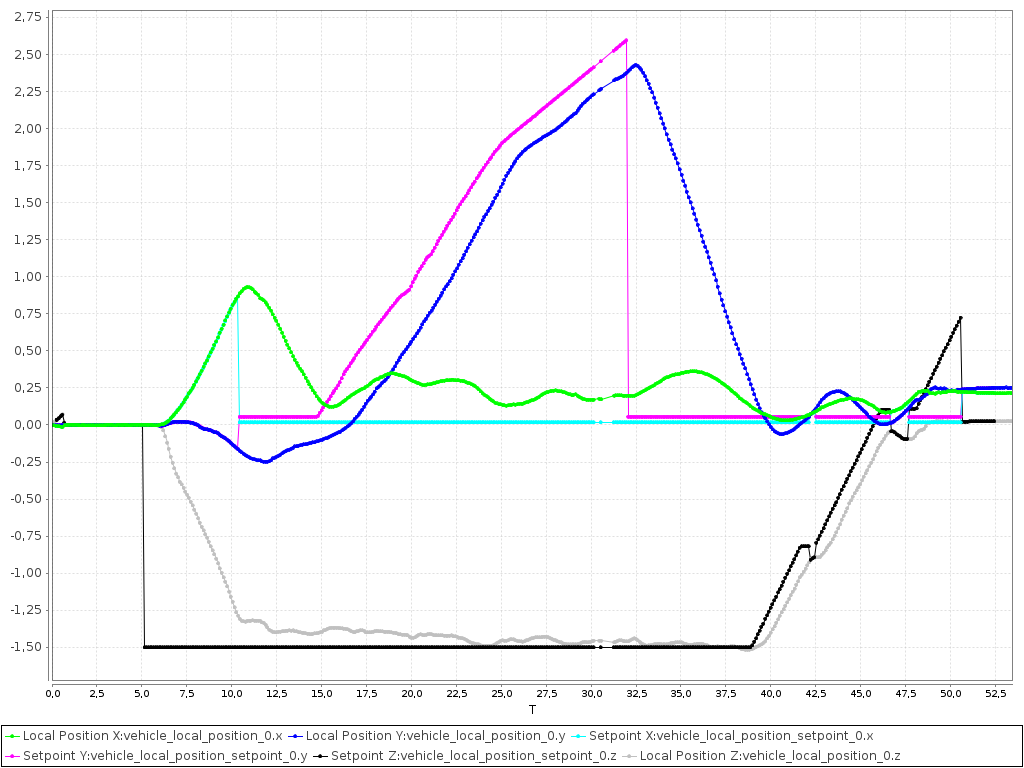
I am developing a program with ROS that wants to have an octocopter do a specific maneuver. I am currently having some problems with the takeoff as the controller seems to ignore the x and y position that are being published to the mavors/setpoint_position/local topic. As it can be seen in the following image and the log, the current position is treated as the setpoint for the x and y coordinates, so only z is being controlled during takeoff. (Cyan and purple lines are following the position lines, instead of staying at 0, the value that is being published to the topic).
I think that the setpoints are being published properly, so I would like to know if there’s a parameter that I am not aware of that is causing this problem or it has to do with my code.