I’m having trouble setting up my base station RTK module.
Here’s my current setup (as recommended in the documentation):
DATAGNSS NANO HRTK receiver (Rover)
DATAGNSS NANO RTK receiver(Base module)
Holybro SiK v3
PX4 v1.16 on MicroAir H743 V2
QGroundControl v5.0.6
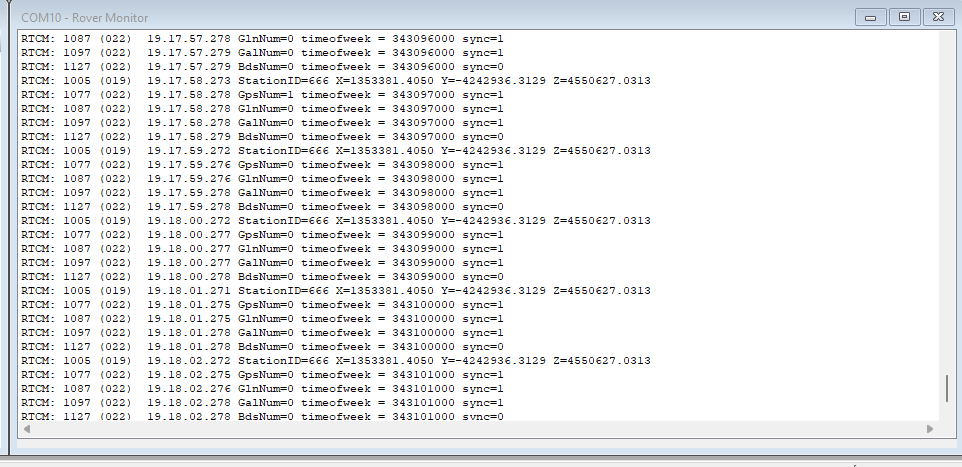
I followed both PX4’s and DATAGNSS’s documentation, but I’m unable to get the RTK base module to connect to QGroundControl. In the Satrack app, I can see RTCM corrections coming in at 1Hz, and according to PX4’s documentation, it should be plug-and-play from this point.
On the rover side, GPS works fine on the drone, just without the corrections.
Hi there, same problem here, but with problems with the NMEA receiver module.
I have the DATAGNSS NANO HRTK receiver that I found on the main guide : DATAGNSS NANO HRTK receiver | PX4 Guide (main) . I changed the protocol from Ublox to NMEA in QGC to be able to see GPS data (usually around 25+ satellites with excellent precision). I tried version 1.16.0 rc3, v1.15.4, and v1.16.0, but I keep having those errors :
Invalid local position estimate
Invalid global position estimate
It seems like the EKF2 rejects the GPS data. Here’s more output for better hindsight :
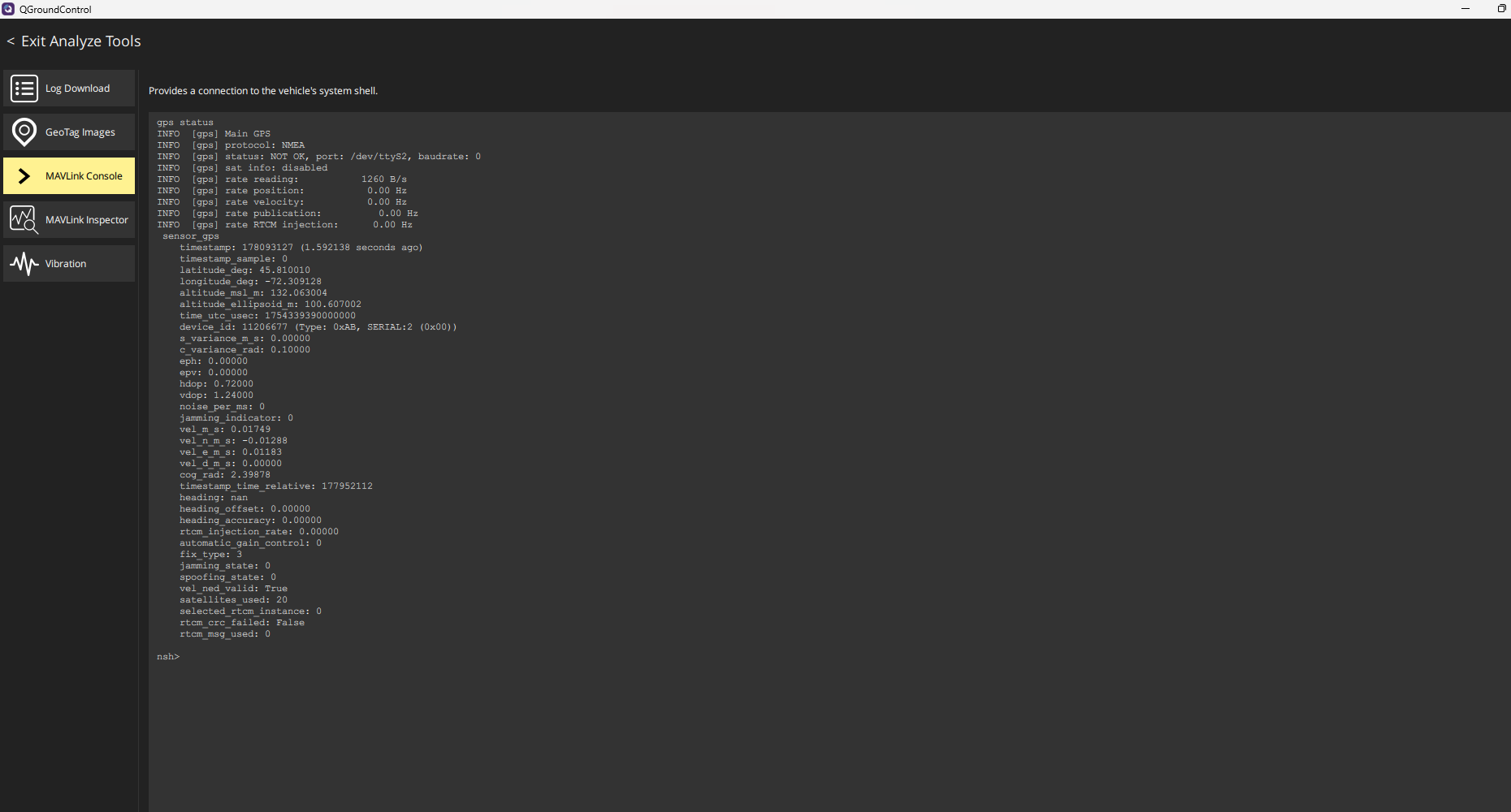
gps status
Sometimes I get status: OK
nsh> gps status
INFO [gps] Main GPS
INFO [gps] protocol: NMEA
INFO [gps] status: OK, port: /dev/ttyS2, baudrate: 230400
INFO [gps] sat info: disabled
INFO [gps] rate reading: 1480 B/s
but other times it switches to NOT OK
nsh> gps status
INFO [gps] Main GPS
INFO [gps] protocol: NMEA
INFO [gps] status: NOT OK, port: /dev/ttyS2, baudrate: 230400
INFO [gps] sat info: disabled
INFO [gps] rate reading: 1547 B/s
After a quick inspection, I noticed the same issue as @Napoleon
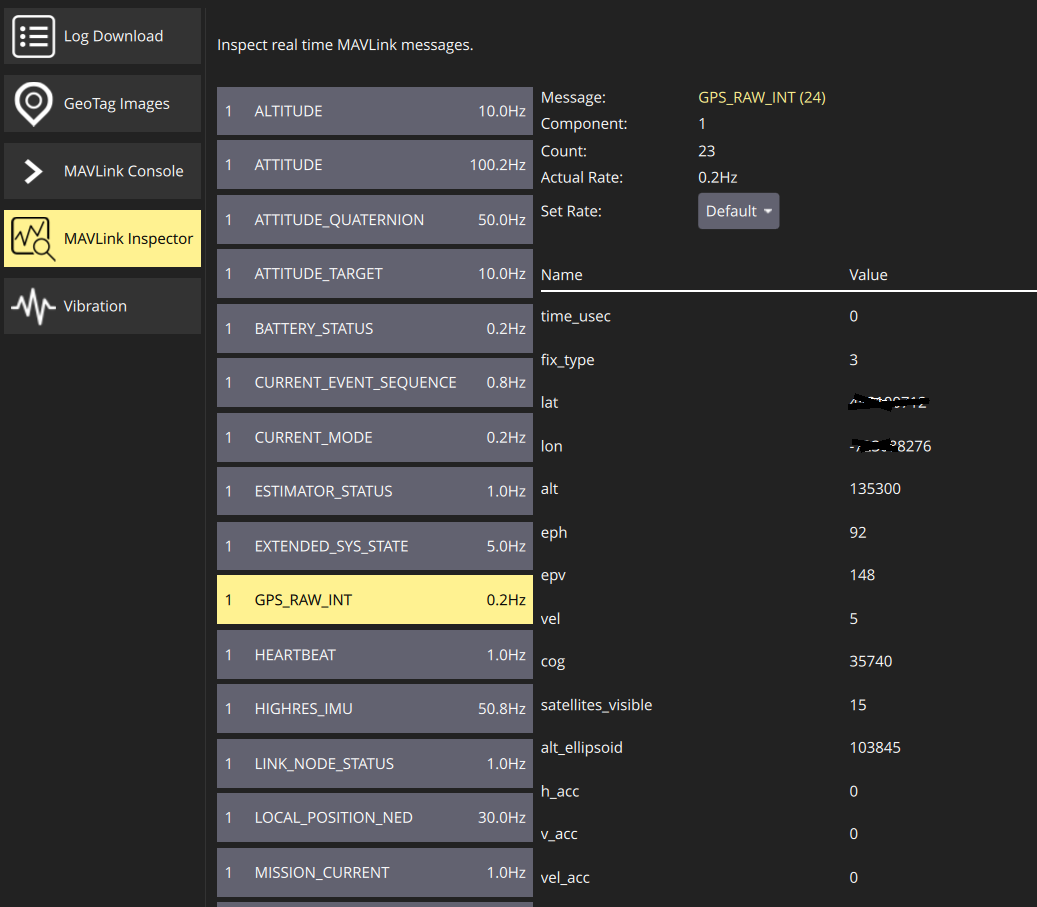
I had always assumed the rover GPS was working fine since I was getting a GPS fix, the number of satellites, and the red arrow appearing in QGC. However, in gps status I see “NOT OK” and a rate of 0 Hz.
I’ve seen many forum posts regarding issues with PX4 and NMEA GPS units. Before buying the DATAGNSS unit, I made sure to choose something listed as officially supported by PX4 to avoid problems. Has anyone actually tested these units before adding them to the officially supported devices list? I can’t seem to find any example of someone successfully using these with PX4.
@JulianOes Have any of the developers had one of these in their hands yet?
Our team has already sent you an email. According to your description, the rover mode (NANO HRTK) is currently functioning properly, but there is an issue with setting up the base (NANO RTK Receiver).
Your setup on Satrack is correct.
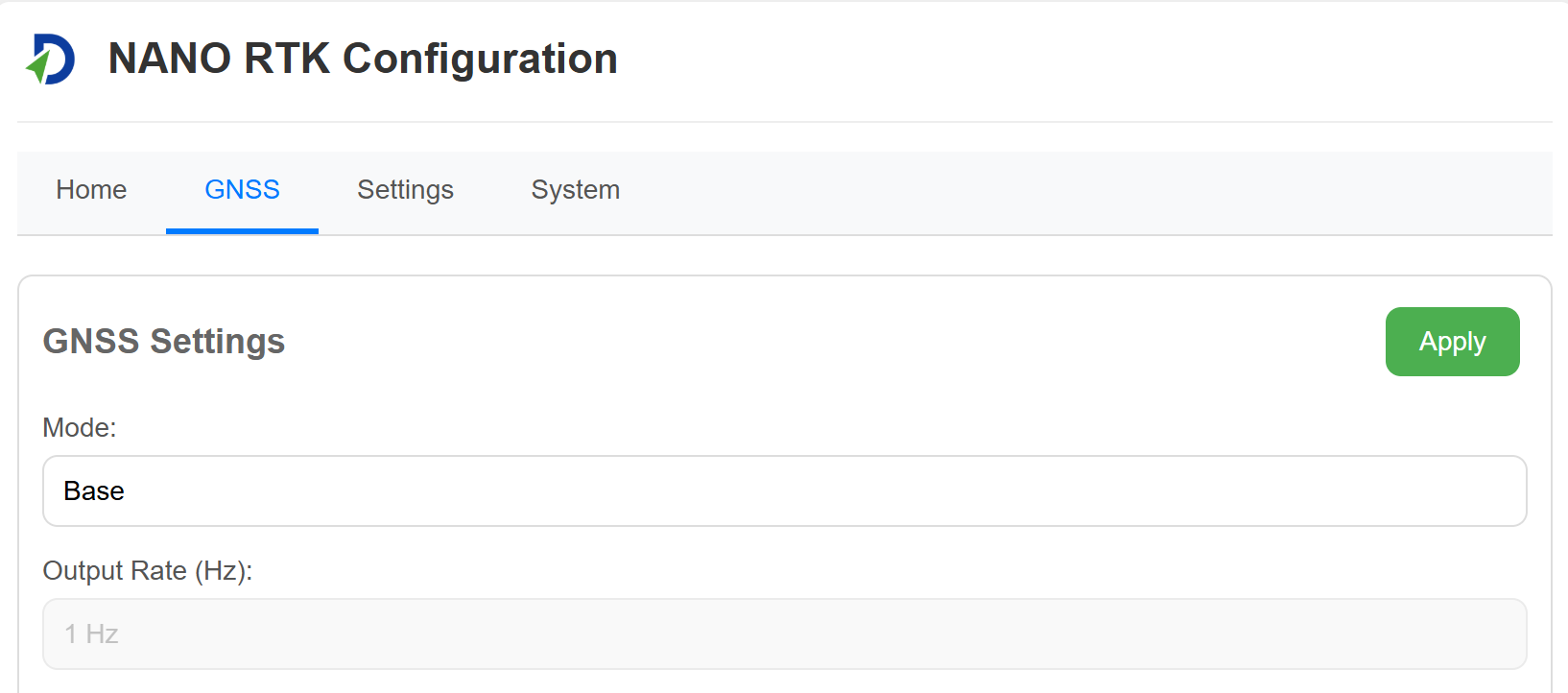
However, since the NANO RTK Receiver is based on ESP32, it will automatically configure itself according to the mode in the web settings during system startup. Therefore, even after your settings, the correct RTCM data output may still not be available. We recommend that you log in to the settings page of the NANO RTK Receiver and change the GNSS mode to base mode or unconfigured mode.
Our colleague has also sent a reply to your email about this issue.
We have carefully reviewed the internal testing procedures and processes, and there are the following issues to share with you:
Currently, DATAGNSS’s RTK receiver is fully compatible with the rover side of PX4 (NMEA format)
On the Base (ground) side, the standard QGC currently does not support DATAGNSS’s RTK receiver to be a base staion automaticlly.
Many of our customers are using an additional pair of radios on the base and rover ends to achieve connectivity for publishing rtcm data.
The good news is that our internally tested version of QGC supports this feature, which means the base side can publish RTCM data to rover, then inject rtcm into the rover rtk receiver.
Our internal R&D department has already planned to test it and submit a PR to QGC repo.
I look forward to the RTK NANO QGC integration, please keep us updated.
For the Rover NMEA GPS unit, I was personally able to get it to communicate with PX4 with the help of @datagnss . For anyone in the future experiencing this issue with this unit (or likely other NMEA modules), I changed two things to make it work:
First, as Jacky from DATAGNSS advised, I changed the CFG file to ROVER 5 Hz in Satrack. After that, I was still getting the “no valid position estimate” and “no valid local position estimate” errors, but at least the rate reading, rate position, and rate velocity were no longer stuck at 0 Hz. I then increased EKF2_REQ_EPH to 5 meters, and later to 10 meters, and the errors disappeared. I was initially skeptical that this would harm GPS accuracy, but I was able to get RTLs consistently within a 30 cm radius and achieve stable position hold (without RTK corrections).
All in all, I’ve been testing the module for the last two days and am happy with the results. I consistently get 16+ satellites indoors and have reached 35 outside in clear sky .