Hi everybody, I’m new to this forum, and actually also fairly new to the topic of flight controllers. I’ve started a project to build my first quattrocopter from scratch and after lots of studies decided to use Pixhawk as a flight controller. Because my first platform will be a fairly small fpv-style frame for 6" props I decided to go for the new Pixhawk 4 mini. I had a Graupner MZ-12 with GR-12L from a fixed wing model that I wanted to reuse. I’m running PX4 Master, because that was the only version connecting to my GR-12L running on SBUS.
Now I’m stuck due to three issues, worst one first: Since 2 days I’m getting the message: preflight fail, baro 0 missing. Checking sensors via Mavlink console I get this:
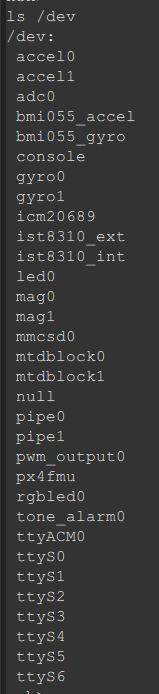
Does this mean it is actually broken or could it be a driver issue?
The other, less severe issues relate to getting Hott telemetry and ESC telemetry to work via telemetry Tx and Rx, respectively.
I didn’t find a matching post…
Would really appreciate some recommendation, I’d like to avoid claiming a product while it actually could be fixed in software.
Thanks in advance,
Gerd