Hello all, hope you are doing well!
I’m having some trouble with the babyshark VTOL airframe, specifically when flying in fixed wing mode.
First the support documents:
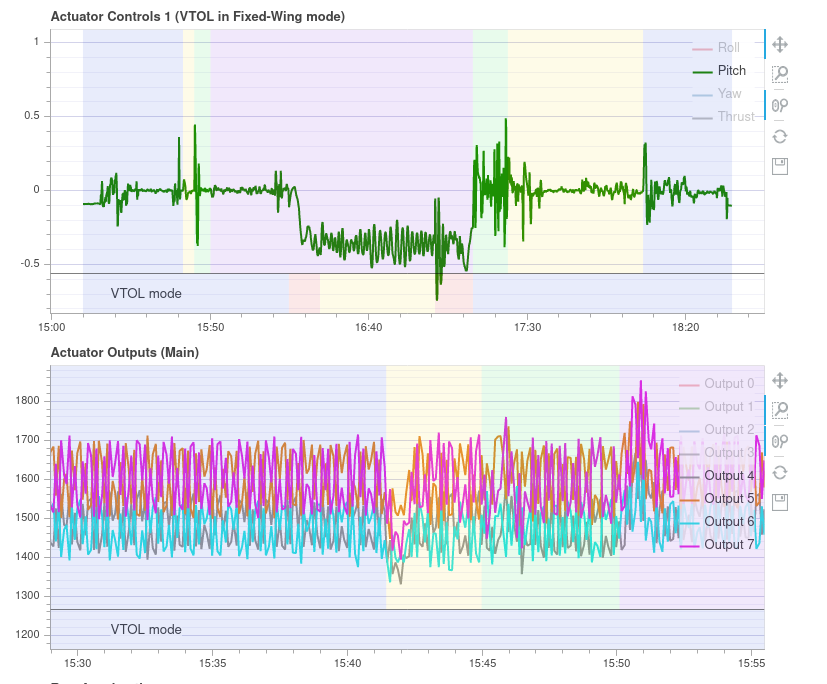
As you can see, the airframe has several pitch oscillations and I don’t really know why.
I’m using mostly the default parameters for the airframe, only a few calibrations were done.
I have noticed that on the ground if I move the roll and pitch sticks on the RC just a little, it goes to the maximum travel of the servo. Is this normal behavior? If not, how can I correct it?
Any other suggestions on what could be causing such oscillations?
Thank you for your time reading, stay safe.
If you are in most any mode other than acro, the control system may drive them to max (or min) as the system is not responding to the control actions.
Thank you for your answer.
I’m doing these tests on the ground, when in stabilized mode, on a leveled surface. All sensors are correctly calibrated.
I move the axis on the RC about 30% (with 0% at the center of the joystick) and it gives me full deflection on the surface.
The system is stationary, it should be responding to my commands, no?
Hi, I had a look at your logs, and I what I see is that the center of gravity of your vehicle is too far in the back. You can see that by looking at the motor commands in hover (the rear motors,so number 5 and 7, have higher values than 4 and 6) and in fixed-wing flight, where the elevator is at about -40% deflection at trim. Move the batteries further forward or add some additional weight in the nose of the vehicle until the CG is there where the manufacturer specifies (which in this case is at the center of the hover motors).
Fixing the trimming issue could already help quite a bit for getting rid of the pitch oscillations, and further I would consider reducing the pitch rate feed-forward gain, FW_PR_FF, from 0.5 to 0.2 (in 0.1 increments) or until the oscillations stop. And then maybe increase FW_PR_P a bit.
If you feel comfortable flying in stabilized mode also in fixed-wing mode then do that, until the pitch oscillations are gone.
About the servo moving a lot on the ground: that is expected, as the servo deflections is scaled by the current airspeed, and if you have no airspeed because it’s on the ground the deflections will be maximal.
Good luck and feel free to post follow-up questions/logs again for reviewing! It’s been a while since I last flew the Babyshark, maybe we could then also update the PX4 airframe config parameters from your findings.
Thank you so much for your help. I will definitely follow your suggestions and when I do, I’ll update this thread.
Since we are on this topic, maybe you have noticed on the videos that in MC hover mode there are some vibrations on the whole airframe ( even though the flight is very stable ). Is there any fix for this symptom?
Once again, thank you a lot, you rule!
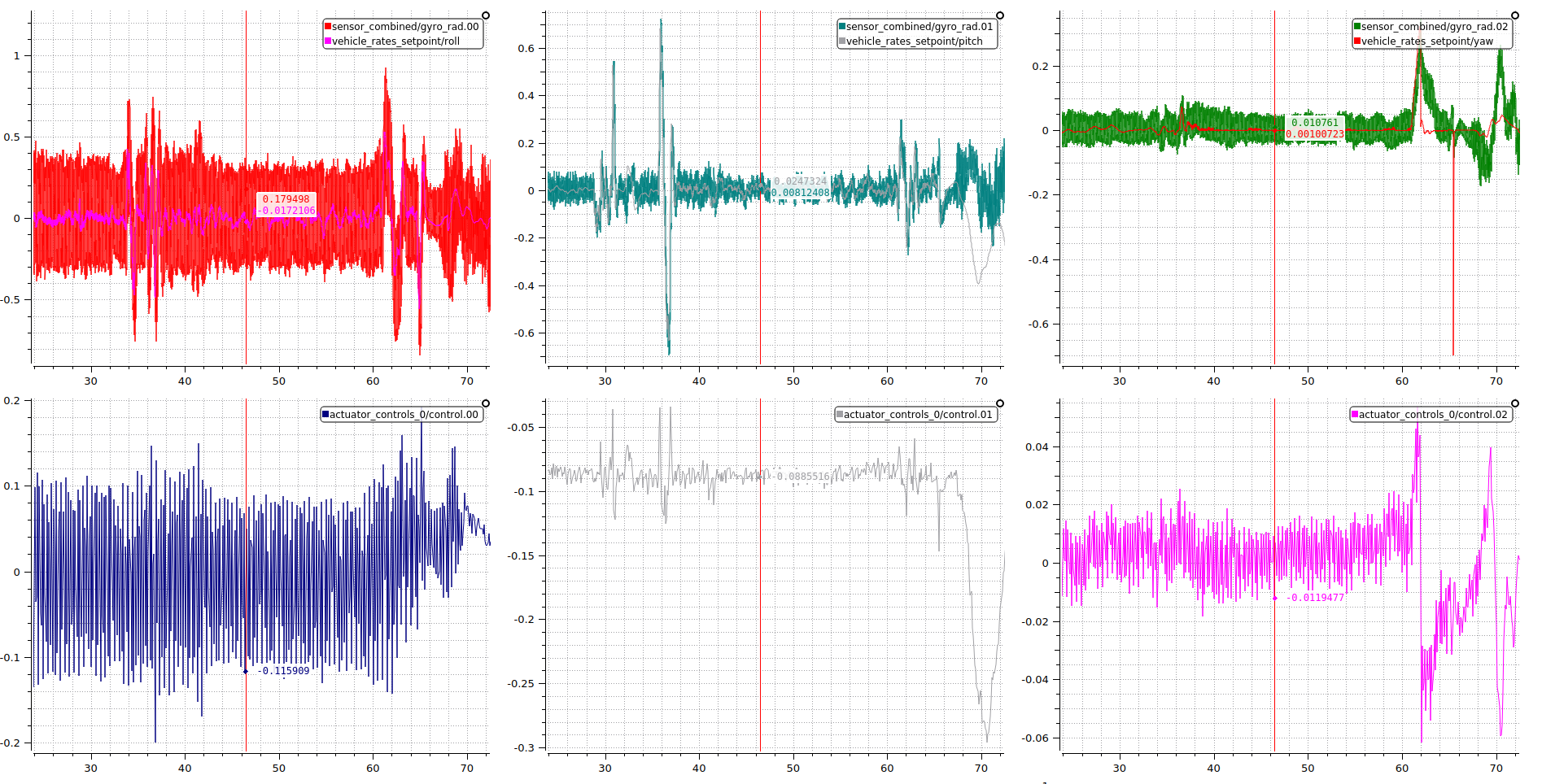
Yes the vibrations both on the roll and yaw axis are quite high it seems, or the rate controllers are tuned too tightly. How is the flight controller mounted in your frame? is there some dampening between it and the body? You could check if reducing the K gains ( MC_ROLLRATE_K and MC_YAWRATE_K) a bit reduces it.
The FC is mounted on top of an acrylic plate, with velcro as the fixation, providing some dampening.
In addition to your last suggestions, I will also try out these changes.
It has never occurred to me this could be a problem as babyshark is a default frame to some extent.
Regardless, you are very kindly giving me great suggestions which I will follow and report back once possible.
Thank you very much.
The FC is mounted on top of an acrylic plate, with velcro as the fixation, providing some dampening.
I doubt that using velcro is the best way to mount it, I would try double sided adhesive tape with some thickness, e.g. Amazon.de
We use that one on a lot of drones and it usually provides enough dampening without too much delay on the rates.