I’m using Pixhawk 2.4.8 and GPS M8N to fly a fixed-wing aircraft autonomously along a mission route that I draw using PX4 firmware and QGroundControl 4.4.4.
Before doing this, I completed all the necessary calibrations.
I created a mission route for the plane.
At first, before arming, I was getting a compass degree error (“Compass inconsistency by (some) degrees”).
To bypass this error, I hold the aircraft’s wings at a certain angle, arm it, and then put it back on the ground before switching to mission mode.
When the mission mode starts, the motors spin at a certain speed. However, at the takeoff point, the motors don’t speed up as expected and the elevators do not move upwards (to lift the aircraft).
When I connect the GPS in the reverse direction (as shown in the photo), the compass error disappears and the aircraft arms successfully while on the ground. The mission starts, but still, the expected behavior does not happen at takeoff.
In order to see “flying” and “mission” on the screen, I need to hold the aircraft at a certain angle and walk with it. While walking, “armed” and “mission” show up on the screen.
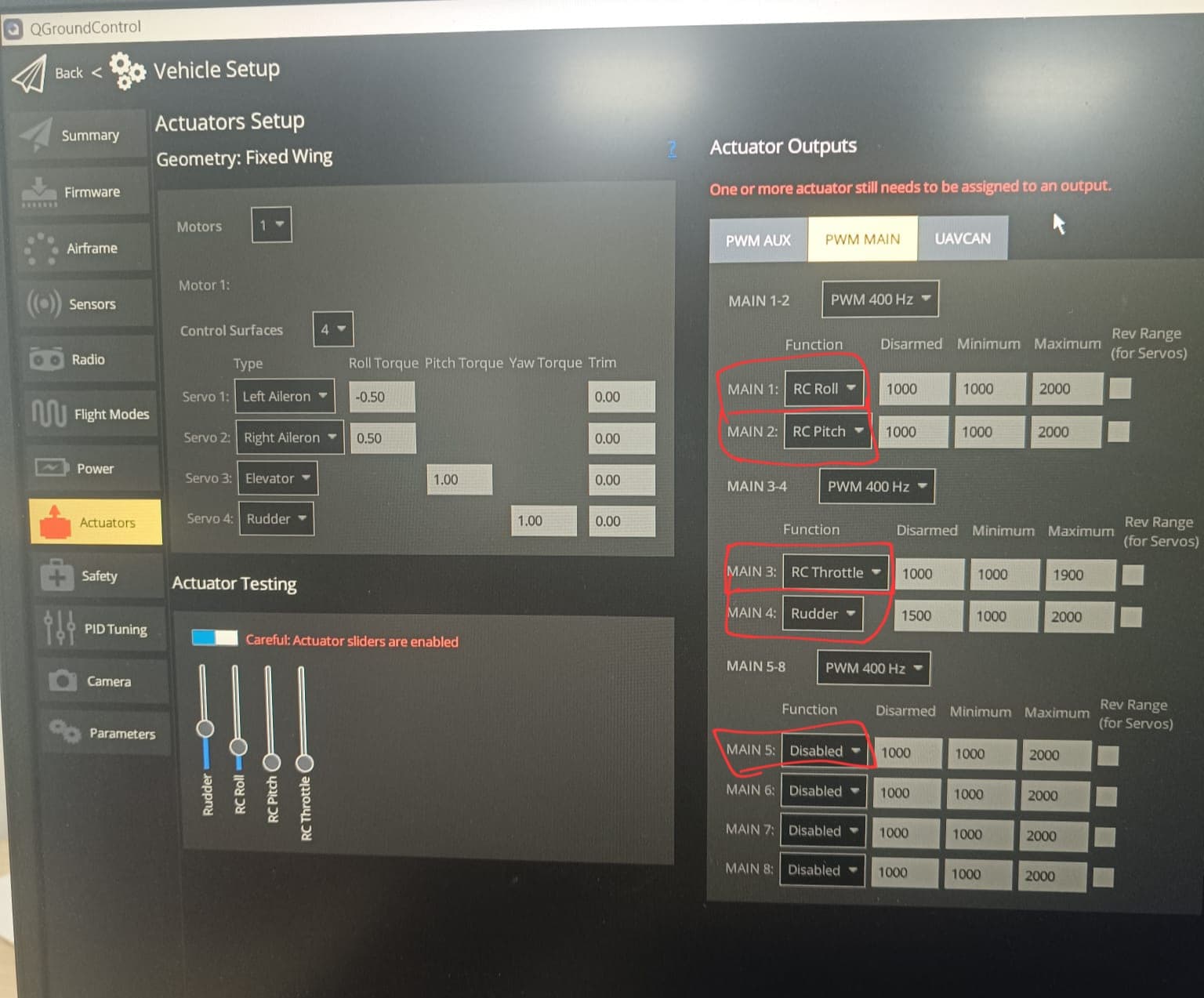
QGC Actuator tab settings:
Same as the second photo, but in order to get rid of the “One or more actuator still needs to be assigned to an output” error, I changed the actuator outputs as follows:
(Only the PWM MAIN section was changed)
MAIN 1: Left aileron
MAIN 2: Elevator
MAIN 3: Motor 1
MAIN 4: Rudder
MAIN 5: Right aileron
Cable connections:
MAIN 1: ailerons
MAIN 2: Elevator
MAIN 3: ESC
MAIN 4: Rudder
MAIN 5: No cable connected
Possible problems I’m considering:
1- Due to GPS, the aircraft may be seeing itself at a high altitude and thinks it’s already flying. For the takeoff altitude in the mission, I tried setting it as current altitude +30m, and also tested with 30 and 15m in the waypoints.
2- When the aircraft reaches launch, takeoff, and waypoint locations, it makes no changes at all, which makes me think it doesn’t recognize those points.