Hi,
on the weekend of March 16th we made two tests.

The 1st test was made using different propeller (two blade propeller 10x8) and different 3D printed rotor plate because we have destroyed both of them during the last landing. This test aimed to verify the suitability of the new parts and test the behaviour of a position mode.
The takeoff was made from the hand, because the model has wheels too small to take off from the grass plane. After two minutes, the flying ended with a controlled impact on the ground. This was due to a non-optimal control of engine by the ‘position’ controller.
Log: https://review.px4.io/plot_app?log=43dd2657-44b9-4634-a0e4-80c665db3d4c
Video of flight: Auto-G2 Pixhawk test - YouTube

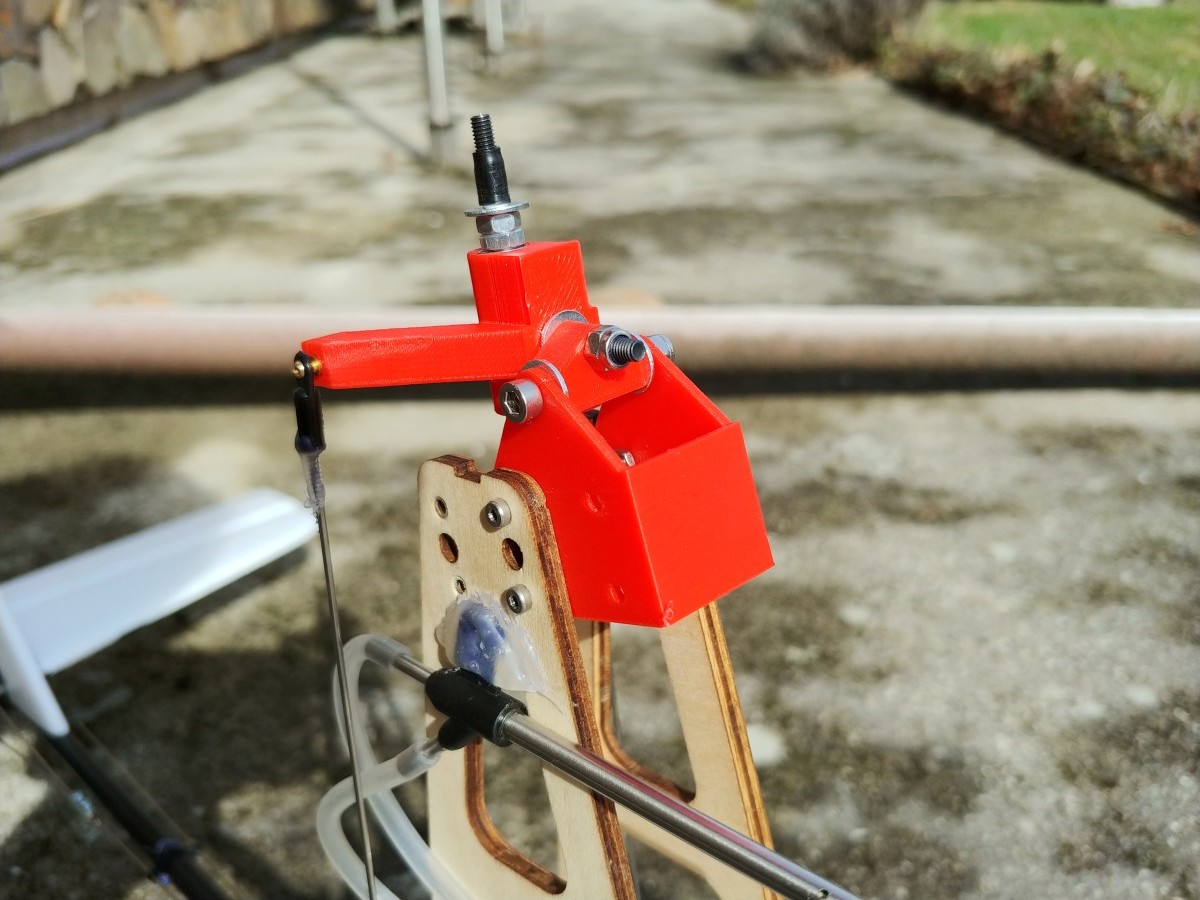
The second test was made with our new 3D printed rotorhead. This rotorhead allows us to move the rotor head in roll and pitch axis. (The original rotorhead was free in roll only.)
After assembling of the whole rotorhead, we found some problems. The biggest one was that the end of the rotor blade was very close to tail wings. And at the smallest pitch of rotorhead, it even hits the rudder. Therefore we have moved rotorhead forward. We have also removed prerotator.
For this test, we have adjusted the mixer file — especially the setting of rotorhead actuators. Pitch of the rotor is obtained from AUX channel.
M: 2
O: 7500 7500 0 -10000 10000
S: 0 0 10000 10000 0 -10000 10000
S: 3 6 -7000 -10000 0 -10000 10000
M: 2
O: 7500 7500 0 -10000 10000
S: 0 0 10000 10000 0 -10000 10000
S: 3 6 7000 10000 0 -10000 10000
Test conditions:
wind around 2 m/s
Sunny weather, 18C
Take-off was made again from hand. After release, the aircraft had quickly lost altitude even with full of throttle. After several turns and an increase in height, the pilot felt loss of engine thrust. He tried to make some more circles -some of them in ‘stabilised’ mode and some of them in ‘hold’ mode.
In the last turn (in hold mode) the aircraft lost its height and crashed into a tree. After the impact the telemetry module and the RC receiver was disconnected from the autopilot. So we didn’t have any response from aircraft immediately after the accident.
Causes of fall are several:
- Lost of engine thrust:
Due to overheating of original ESC the engine thrust was decreasing. It is possible to see on the next graph, depicting the comparison of throttle setpoint and consumed current.
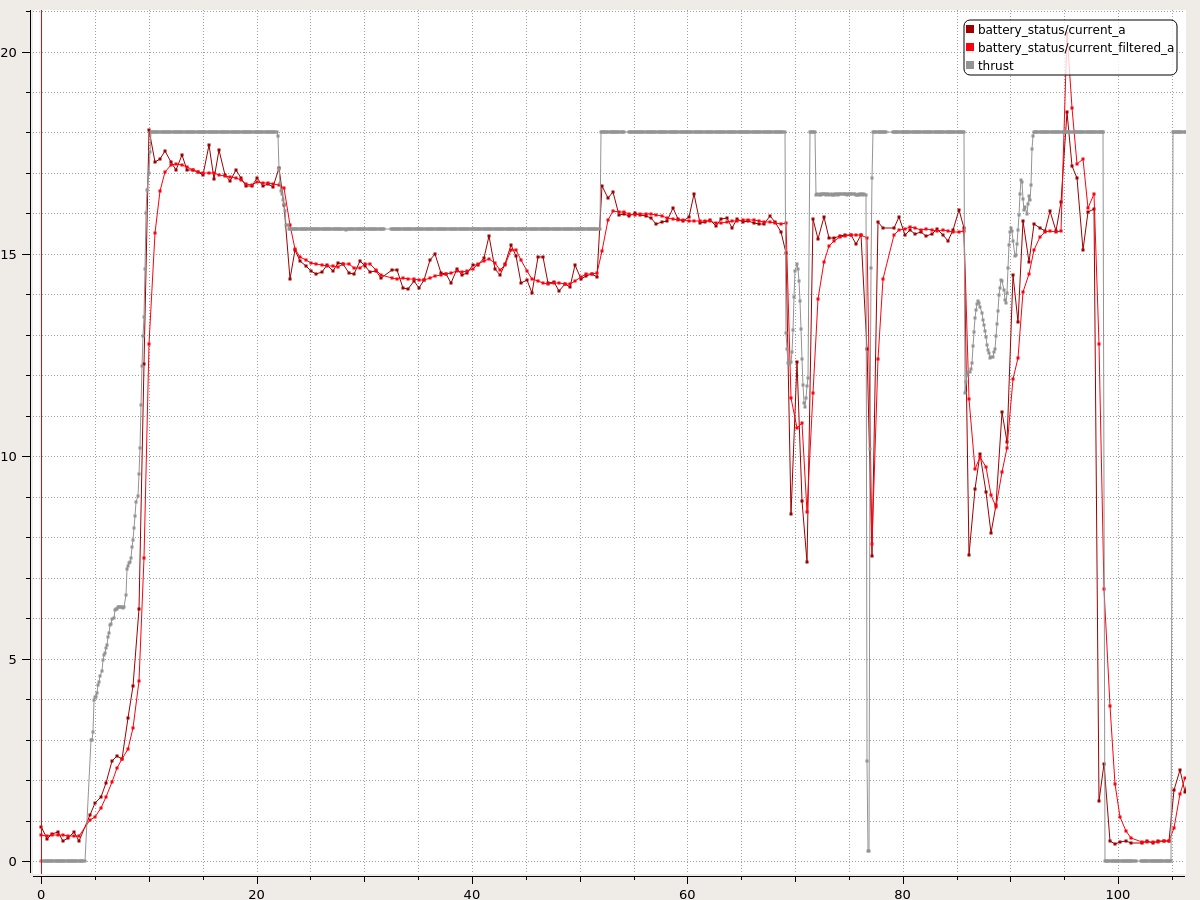
ESC was placed under batteries in plastic tubing and in polystyrene body of the autogyro.
-
Too large tilt:
We set the default values of maximal pitch and roll setpoint. Pitch setpoint was sometimes too large, and it was hard to reach this setpoint in conjunction with the previous problem. -
Rotor pitch tilt was too large.
-
Center-of-gravity was too height.
Log: https://review.px4.io/plot_app?log=e2ffd81d-6fc1-4158-bdf6-cccfe1b3721d
Video: AutoG2 autogyro with PX4 autopilot - takeoff 5 - YouTube
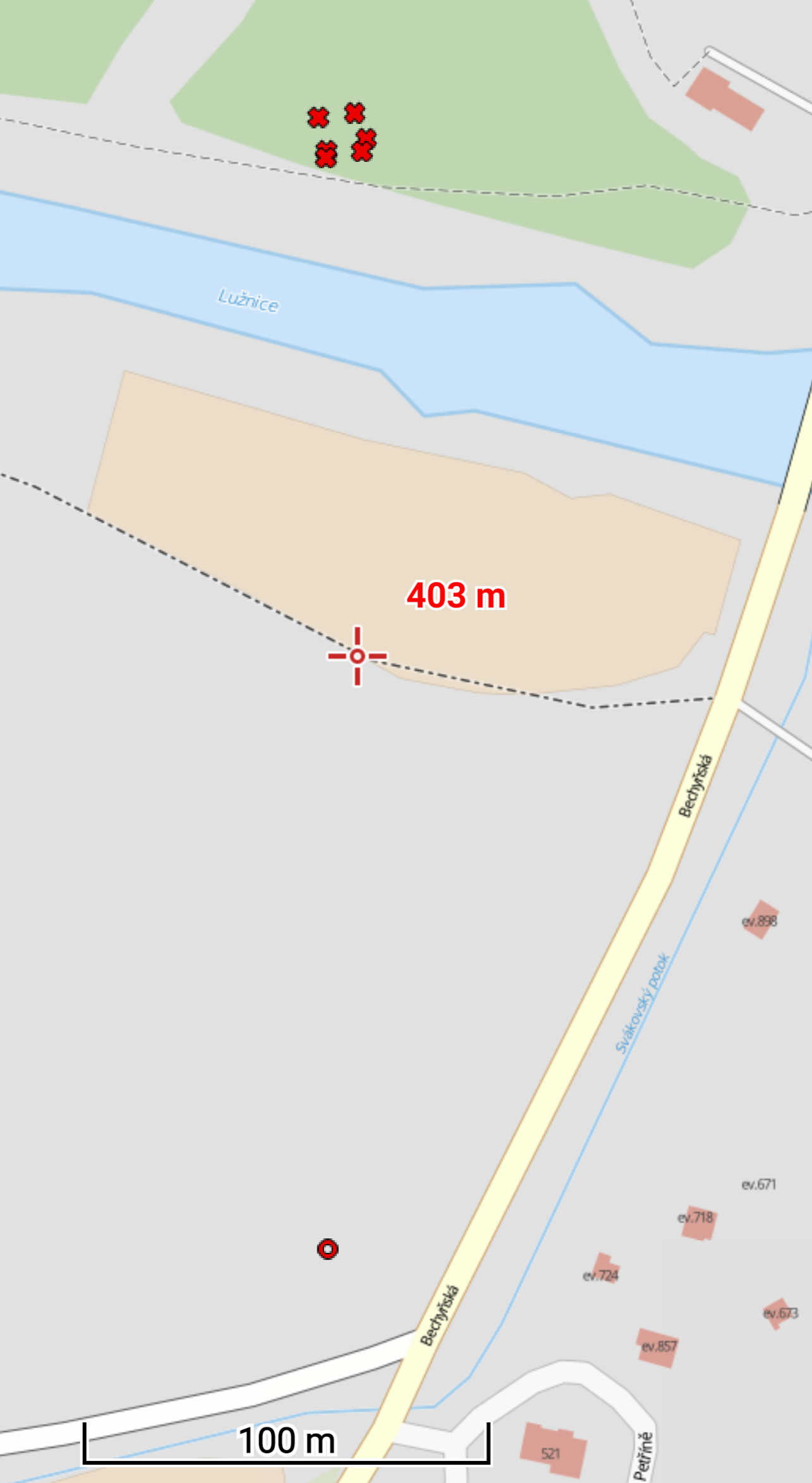
Autogyro crashed and fell down a few meters behind the river. Then we had to move to the site of the accident and the search for all parts began. Location of all parts can beseen on the next map.

(Little off-topic question: Why are all parts in dark colours? And not in bright ones to find them more easily? ![]() )
)
We have found a problem with the damaged antenna. (mentioned here: Antenna for telemetry module SiK radio)