Hi,

we have tried to fly with autogyro Auto-G2 with PX4 autopilot. After recieving the package from HobbyKing we were surprised, that model is more similar to the airplane (fixed-wing) then autogyro (as here http://www.aviastar.org/theory/autogiro/fig12.gif ) This is because it is possible to control only thu roll axis of the rotor-head. And elevator and ruddle is so big and efficient to compare with autogyro body mass. So we decided to try model with fixed-wing regulator.
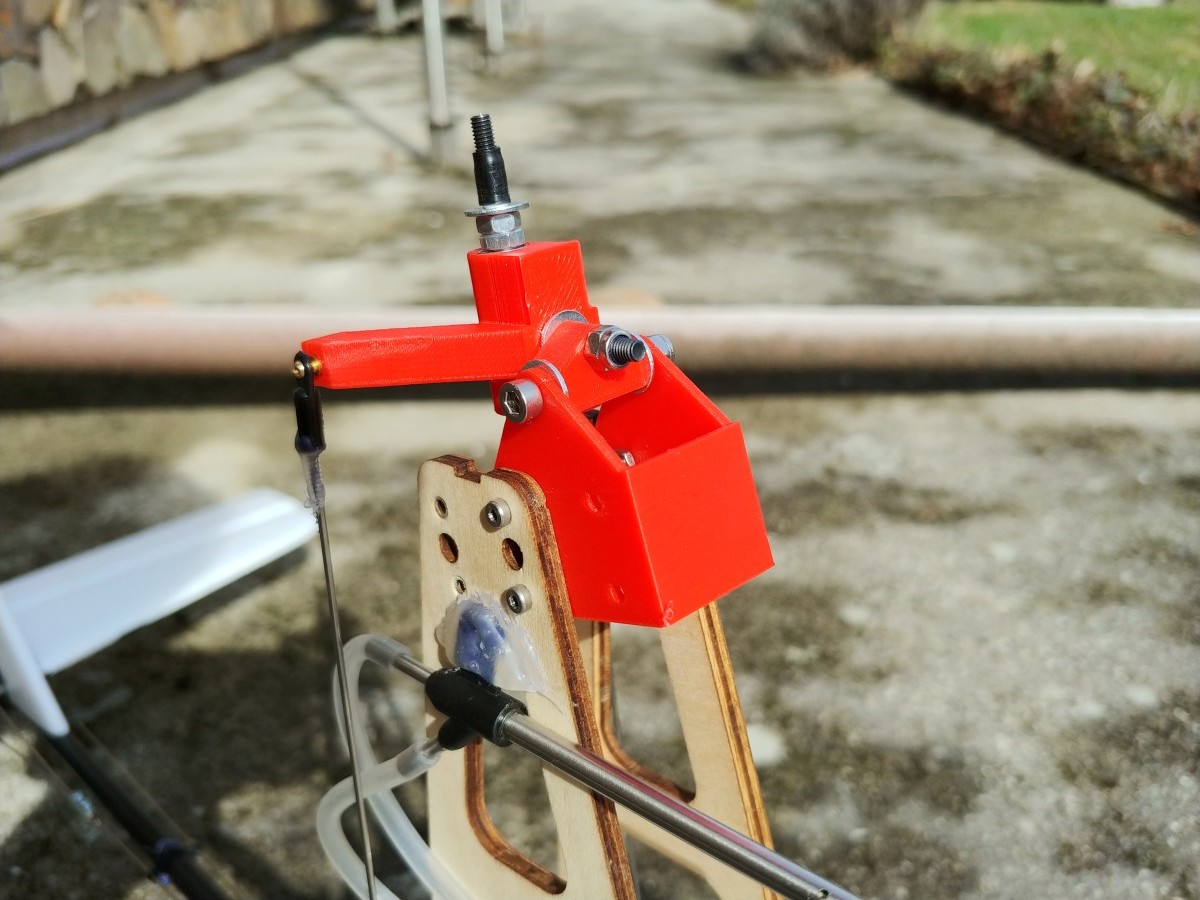
The first thing we had to solve was how to attach autopilot with all accessories to such small autogyro. Autopilot, RC receiver, Telemetry radio and airspeed sensor were attached from outside with loop and hook fasteners. Pitot pipe was mounted on the top of top pilon using a hot-glue.
Battery, Power module, small GPS with antenna and regulators were placed inside.

After the installation and wiring of all equipment, we have measured the center-of-gravity. It was a few cm from the rear side.
Software
As I mentioned earlier we have decided to use a fixed-wing regulator. So, we have created new autogyro Airframe and corresponding mixer with limits for this model.
First test
We have decided to make the first take-off from near model-airport with grass ground. After winter the grass was very short. But the surface wasn’t very smooth. The weather was not perfect. It was raining quite heavily and a wind was blowing. The main problem was, that we have forgotten to take scotch-tape to cover top service hole. Despite that, we have tried to start.

The first start was unsuccessful due to fear of adding throttle ![]() and an unknown drag motor torque effect. After the second test (fall) the damages was as follows:
and an unknown drag motor torque effect. After the second test (fall) the damages was as follows:
- A torn telemetry receiver and autopilot (Torn from double-side tape).
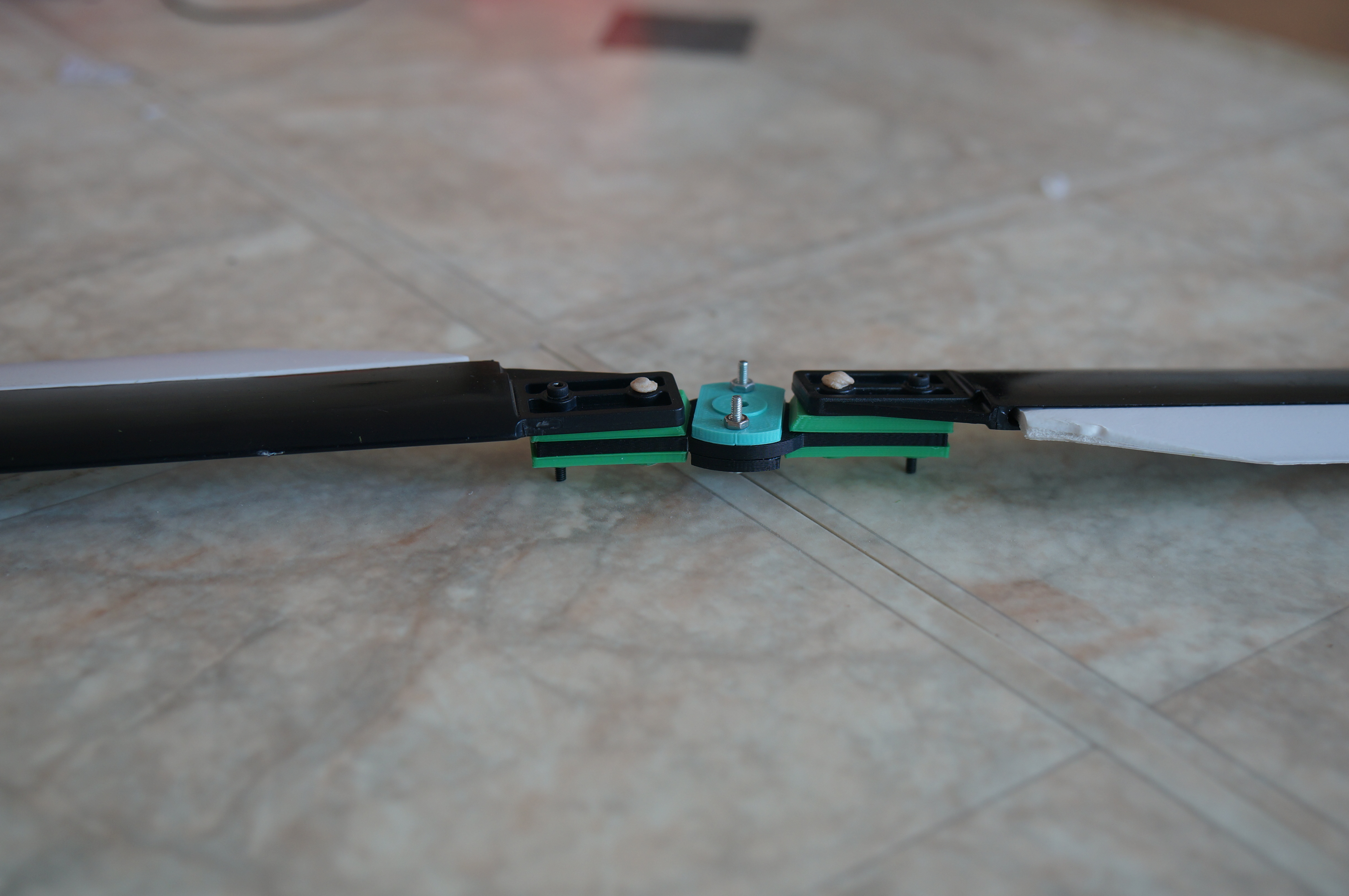
- Rotated tail wings.
- The whole model was dirty from mud.
On the way back we had to clear the road of the fallen tree due to the strong wind. ![]()

Preparation
After repairing all the damage, we were thinking of how to make the next start better and where to find a better surface. We have recharged batterries and wrapped all things (with scotch-tape ![]() ). A few minutes before departure, I have set thechanging flight-modes by one channel from RC (setting were: manual, stabilized and hold).
). A few minutes before departure, I have set thechanging flight-modes by one channel from RC (setting were: manual, stabilized and hold).
Second test
After arriving to a different place - a small hill it was still raining and the wind was 15 - 20 m/s. The surroundings were very muddy. We wanted to “take-off” drone during the run. I caught the drone, waited the rotor to spin up by autorotation and traied to run agains the wind. I did not fell any strong lift effect by the rotor. The next run was with the drag motor turned on and it had significantly better behaviour.
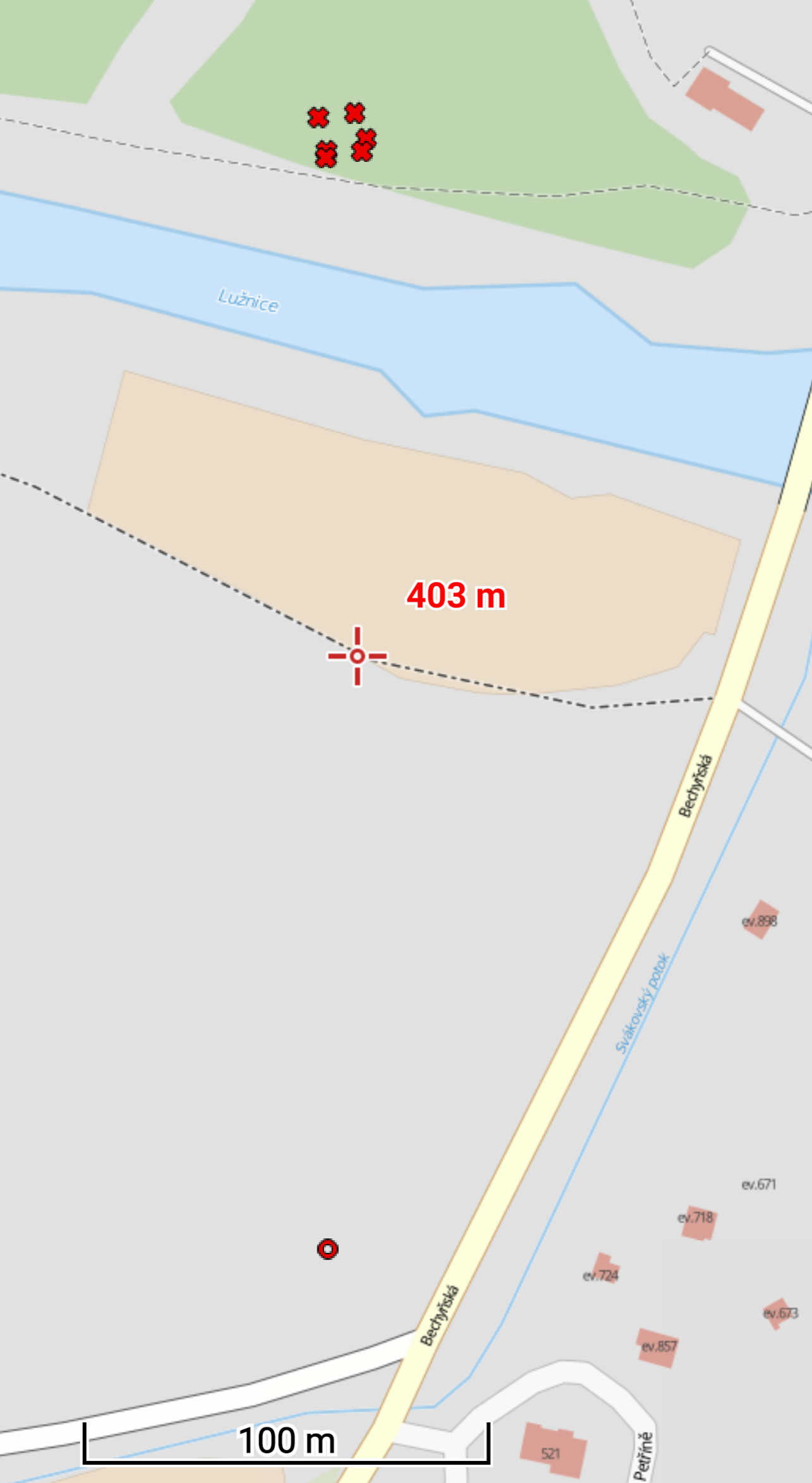
So we agreed that when I start to feel the lift from the rotor I begin to count down and then I will release it. After running with a higher speed and spin-up the rotor to higher RPM I released it. My colleague tried it to control it. He climbed with the drone to some altitude and tried to make wind-crossing because the wind was very strong. He made 4 controlled turns and then the drone was carried away by the wind. All area-defense functions were switched off. He remembered a newly added hold button and tried what it will do. It was more of surprise, because we have tried it only in gazebo simulator with the standard plane. The dron was about 1 km away and we had no visual contact. Visibility of the model under those weather conditions was maximally 200 m.
The only solution was to run to see the QGC if the plane was still flying. And suprisingly, it was flying! It even circled around its position somewhere above a forest in 60 m.a.e. We were very surprised. The only solution was to call the airoplane back. So I have clicked to map and made swipe to confirm. The hold mode loop ended and the drone got directions toward us. We had only a map to map with a red arrow to rely on.
After few minutes the drone started to make a circle above us. And QGC alerted us about the discharged batteries. Landing was made under the stabilized mode and thus it was very fast. However, the landing ended badly because the elevator was fully down during the whole landing. Therefore, the landing was completed without a landing flare.

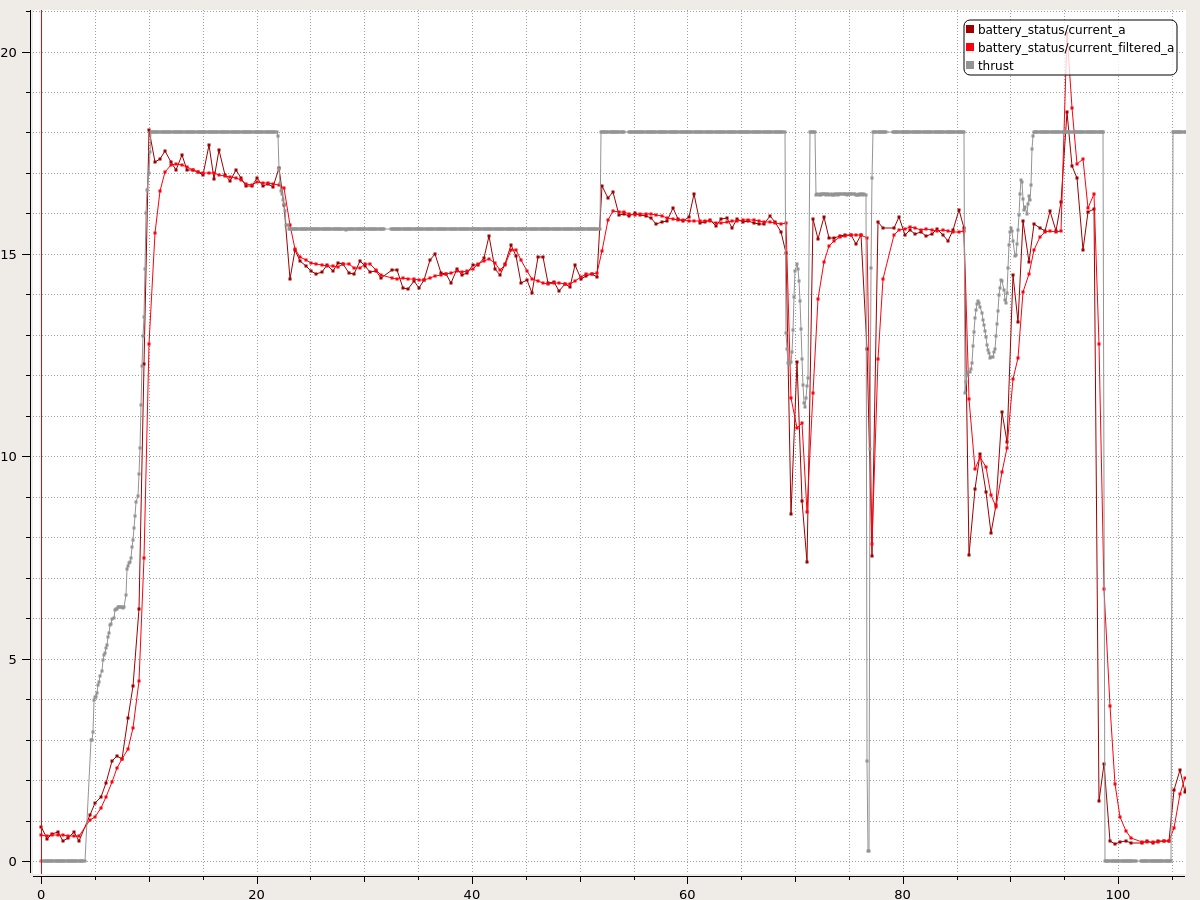
https://review.px4.io/plot_app?log=068026df-aa7c-4db7-a2b4-d7790524d53b

HW
We have used PX4_FMUv3 autopilot.
QGS
Telemetry receiver was connected to our mission computer (Ubuntu 18.04) with MAVROS mavlink router and MAVLINK was routed through Ethernet cable to control the computer with QGC.
Next
As next improvement, we would like to make rotor-head with two free axes (roll and pitch). For that, we would like to use 3D print. It should be more similar to this The Theory of the Autogiro (fig. 12).










{kind=link}