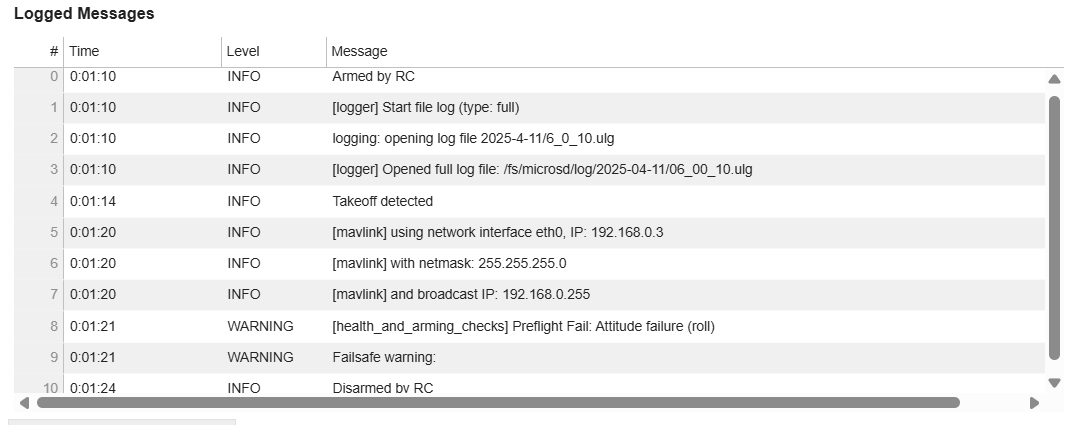
Hello guys,my quadcopter drone with FMU V6X flight controller crashed yesterday with the following error message.
It’s very strange and it was normal for me to fly a few minutes ago. But the last time it took off in attitude mode, and a few seconds later the drone crashed.
The flight log shows that the gyroscope has an X-axis angular velocity of up to 1000°/s, and I don’t know what caused it.
Can someone help me analyze the cause?
I’ll upload another flight log, which is a log of a normal flight a few minutes ago, which can be used as a reference for analysis.
it looks like hardware failure, in order of suspicion: motor (#4), ESC, IMU
the hint is motors control charts: motors opposite to the faulty one lower thrust to maintain balance
error message is not relevant, it’s a side effect of the crash.
the drone needs tuning, it’s badly shaking because of untuned rate controllers.
Thank you for your reply. This is a good suggestion, and I will test MOTOR4 and ESC4 on Monday.
However, it is somewhat strange that during the previous flights, the drone’s MOTOR1 to MOTOR4 (ESC1 to ESC4) were functioning normally.
Is it possible that the roll axis’s angular velocity PID parameters are set too high, causing the drone to crash?
I’d say that random motor failures do happen. Could be motor attachment screws, or a lost prop, becuase of a loose nut. They do get unscrewed in flight sometimes, even if they are tight before the flight.
Roll rate parameters should be lower, but they would not cause such a crash. If controller was the problem, you would probably see increasingly stronger oscillations, rather than a sudden flip.
Thanks, your point is correct, but after testing, it was found that ESC2 was damaged and could not drive the motor to rotate, is this consistent with the log waveform?