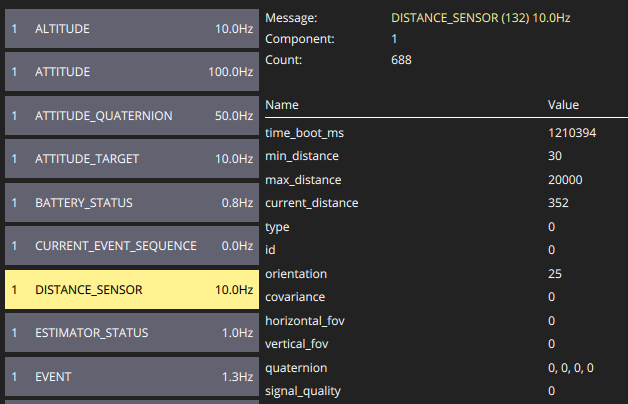
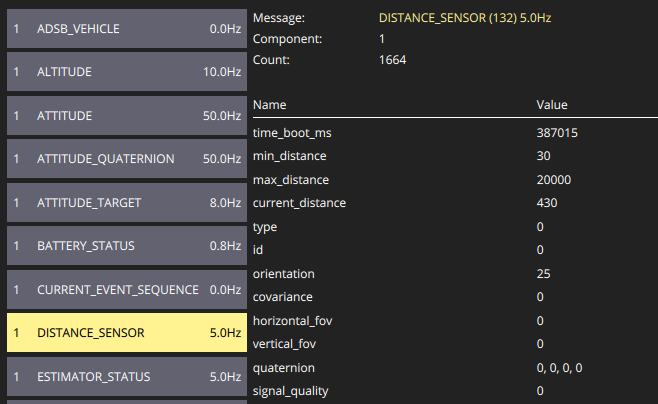
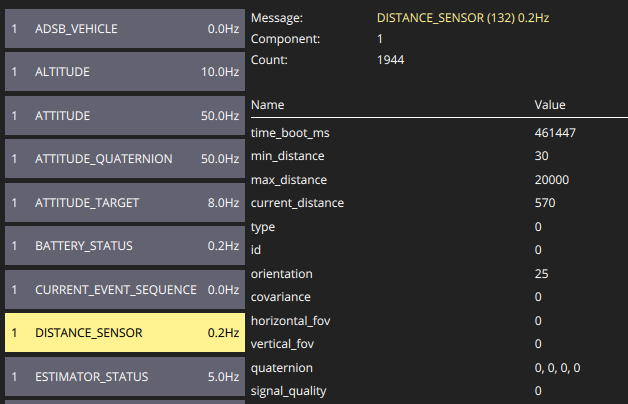
Hello everyone, I’m currently using the Ark Flow MR for optical flow positioning. However, when the distance exceeds 4 meters, the Ark Flow MR starts to reduce its output frequency, which causes the drone to lose proper positioning.
I tried modifying _long_range_threshold in AFBRS50.hpp, but it had no effect. How can I make the Ark Flow MR maintain a constant output frequency of 10Hz?
Note: I tested with the Ark Flow, and regardless of the distance, it consistently outputs at 10Hz.
Test altitude: 10 meters
PX4 version: 1.14
FYI @AlexKlimaj maybe you can comment.
The optical flow sensor or the distance sensor reduces output?
The distance sensor is configurable output in short range and long range.
What are your settings?
Only the distance sensor will reduce the output rate when the distance exceeds a certain value.
If the Ark flow MR is shaken or swayed, its output rate will continue to decrease
According to the release notes on the Ark flow official website, the default switching distance between short range and long range is 4m, and the output rate is 5Hz, but I did not find the parameter SENS_AFBR_L_RATE. What should I do to prevent the output rate from decreasing?
The px4 version I use is v1.15.4
The parameters for the ARK Flow MR in QGC are under the node ID on the side.
Thank you for your reply. I found the parameters of Ark flow MR, and these parameters have indeed improved the output rate of ToF.
If I encounter other problems during the subsequent testing process, I will come back to ask you for advice. Thank you.
Hello,
When testing optical flow positioning with PX4 Firmware v1.14.2, I found that it can only maintain stable positioning below an altitude of 3 meters. Once the altitude exceeds 3 meters, the drone starts to drift horizontally. However, under the same test environment and parameters, PX4 Firmware v1.15.4 can maintain stable positioning even above 10 meters.
May I ask what I can do to make the optical flow performance in v1.14.2 as good as in v1.15.4?
Please always share a log file