Hi guys, I am facing with air speed sensor calibration error right now. I searched about it in that forum , and I read all of the problems most of them has same error and I tried to solve that as they did but I got nothing, and the other questions have not answered yet.
I have a MS4525 (in below px4airspeedv1.1), QGC version is: 4.1.4 px4 version is : 1.13.0dev My controller is holybro durandal airframe is: Generic Quad Delta VTOL
then I connect my sensor GND to GND, 5V to 5V, SDA to SDA and SCL to SCL , in my controller I used I2CA port.
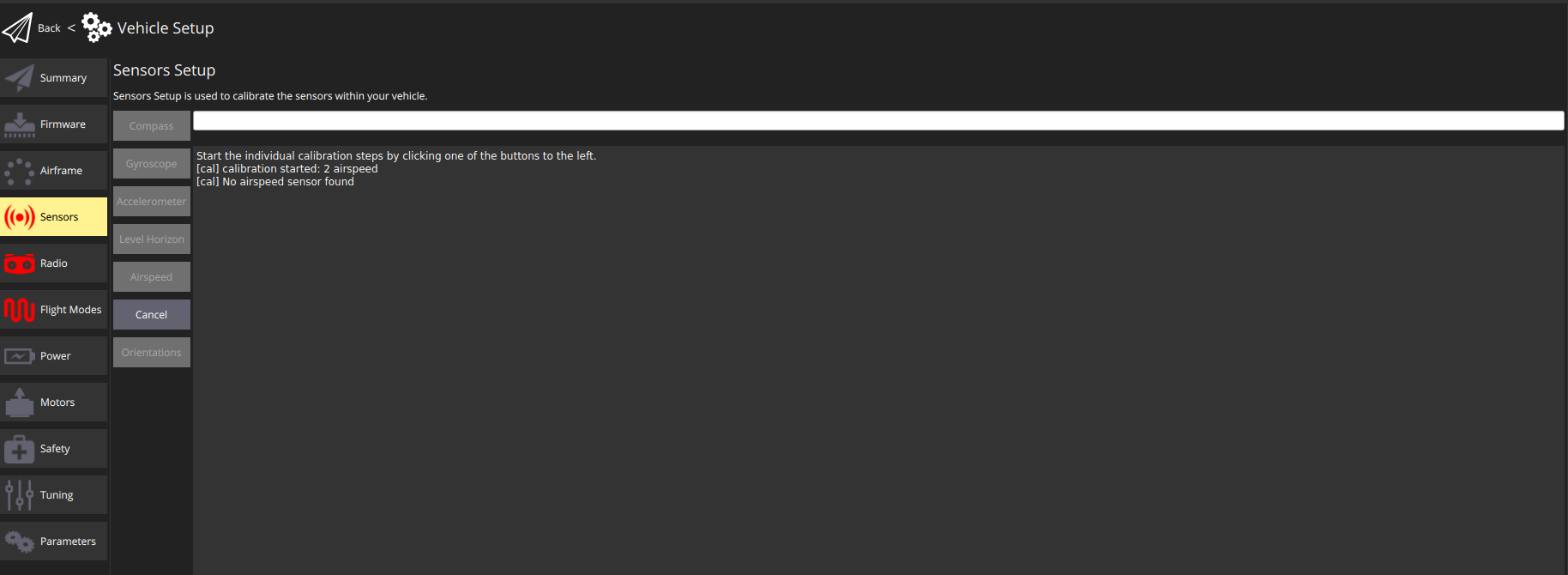
I made parameter SENS_EN_MS4525 as 1 in QGC parameter list then I tried to calibrate it in QGC, then I got thar error:
then I closed QGC then I entered nsh terminal.
I command:
nsh> ms5525_airspeed status
INFO [SPI_I2C] Not running
nsh> ms5525_airspeed start -I -X
WARN [SPI_I2C] ms5525_airspeed: no instance started (no device on bus?)
nsh> ms5525_airspeed start
ERROR [SPI_I2C] need to specify a bus type
Usage: ms5525_airspeed <command> [arguments...]
Commands:
start
[-I] Internal I2C bus(es)
[-X] External I2C bus(es)
[-b <val>] board-specific bus (default=all) (external SPI: n-th bus (default=1))
[-f <val>] bus frequency in kHz
[-q] quiet startup (no message if no device found)
[-a <val>] I2C address
default: 118
stop
status print status info
nsh> ms5525_airspeed start -q
Usage: ms5525_airspeed <command> [arguments...]
Commands:
start
[-I] Internal I2C bus(es)
[-X] External I2C bus(es)
[-b <val>] board-specific bus (default=all) (external SPI: n-th bus (default=1))
[-f <val>] bus frequency in kHz
[-q] quiet startup (no message if no device found)
[-a <val>] I2C address
default: 118
stop
status print status info
nsh> ms4525_airspeed start -b 4
ERROR [SPI_I2C] need to specify a bus type
Usage: ms4525_airspeed <command> [arguments...]
Commands:
start
[-I] Internal I2C bus(es)
[-X] External I2C bus(es)
[-b <val>] board-specific bus (default=all) (external SPI: n-th bus (default=1))
[-f <val>] bus frequency in kHz
[-q] quiet startup (no message if no device found)
[-T <val>] Device type
values: 4525|4515, default: 4525
stop
status print status info
then I stuck in that problem.
If you had a solution or any guess about it could you make me know.
Have a nice day, thanks.
I try to see my sensor is working or not by coding in Arduino and it worked:
Code:
//#include <WireMW.h>
#include <Wire.h> //I2C library 0x28H
byte fetch_pressure(unsigned int *p_Pressure); //convert value to byte data type
#define TRUE 1
#define FALSE 0
void setup(void)
{
Serial.begin(9600);
Wire.begin();
delay(500);
Serial.println(">>>>>>>>>>>>>>>>>>>>>>>>"); // just to be sure things are working
}
void loop()
{
byte _status;
unsigned int P_dat;
unsigned int T_dat;
double PR;
double TR;
double V;
double VV;
while (1)
{
_status = fetch_pressure(&P_dat, &T_dat);
switch (_status)
{
case 0: Serial.println("Ok ");
break;
case 1: Serial.println("Busy");
break;
case 2: Serial.println("Slate");
break;
default: Serial.println("Error");
break;
}
PR = (double)((P_dat-819.15)/(14744.7)) ;
PR = (PR - 0.49060678) ;
PR = abs(PR);
V = ((PR*13789.5144)/1.225);
VV = (sqrt((V)));
TR = (double)((T_dat*0.09770395701));
TR = TR-50;
Serial.print("raw Pressure:");
Serial.println(P_dat);
//Serial.println(P_dat,DEC);
//Serial.println(P_dat,BIN);
Serial.print("pressure psi:");
Serial.println(PR,10);
Serial.print(" ");
Serial.print("raw Temp:");
Serial.println(T_dat);
Serial.print("temp:");
Serial.println(TR);
Serial.print("speed m/s :");
Serial.println(VV,5);
delay(1000);
}
}
byte fetch_pressure(unsigned int *p_P_dat, unsigned int *p_T_dat)
{
byte address, Press_H, Press_L, _status;
unsigned int P_dat;
unsigned int T_dat;
address = 0x28;
Wire.beginTransmission(address);
Wire.endTransmission();
delay(100);
Wire.requestFrom((int)address, (int) 4);//Request 4 bytes need 4 bytes are read
Press_H = Wire.read();
Press_L = Wire.read();
byte Temp_H = Wire.read();
byte Temp_L = Wire.read();
Wire.endTransmission();
_status = (Press_H >> 6) & 0x03;
Press_H = Press_H & 0x3f;
P_dat = (((unsigned int)Press_H) << 8) | Press_L;
*p_P_dat = P_dat;
Temp_L = (Temp_L >> 5);
T_dat = (((unsigned int)Temp_H) << 3) | Temp_L;
*p_T_dat = T_dat;
return (_status);
}
output:
raw Pressure:8071
pressure psi:0.0012207925
raw Temp:760
temp:24.26
speed m/s :3.70704
Ok
raw Pressure:8071
pressure psi:0.0012207925
raw Temp:761
temp:24.35
speed m/s :3.70704
Ok
raw Pressure:8076
pressure psi:0.0015598833
raw Temp:760
temp:24.26
speed m/s :4.19037
Ok
raw Pressure:7643
pressure psi:0.0278065800
raw Temp:760
temp:24.26
speed m/s :17.69214
Ok
raw Pressure:7555
pressure psi:0.0337748527
raw Temp:761
temp:24.35
speed m/s :19.49859
Ok
raw Pressure:8076
pressure psi:0.0015598833
raw Temp:761
temp:24.35
speed m/s :4.19037
and you can see that when I blow its speed is increasing.
I don’t know how sensor probing is implemented in this driver. And ms4525_airspeed start -X -b <port_number> it doesn’t work? Have you tried another i2c port?