In Return Mode page, it is described that the quadrotor goes up to RTL_RETURN_ALT and move to the home position, then the quadrotor descend to the RTL_DESCEND_ALT. When the quadrotor reach to RTL_DESCEND_ALT, it will hold the position for RTL_LAND_DELAY before landing.
However, I simulated it in gazebo ($ sudo make px4_sitl gazebo). It is not correct!
The quadrotor goes up to RTL_DESCEND_ALT and move to the home position. Then it hovers for RTL_LAND_DELAY and land.
For your information, I set the RTL_* parameters as shown in the following figure;
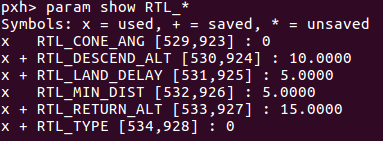
Did I do something wrong?
Please check this it for me.
Thank you in advance.